
То, что пилоты коптеров видят во время полета — это аналоговый сигнал FPV камеры с небольшой задержкой. Чтобы выбрать хорошую курсовую камеру для коптера, нужно учесть несколько вещей которые мы и рассмотрим в этой статье.
Оригинал: How To Choose FPV Camera For Quadcopters and Drones
Выбираем лучшую FPV камеру для дрона/коптера
FPV камера (или курсовая камера) – это одна из наиболее важных частей вашего коптера. Не важно на сколько хороший видеопередатчик, качество картинки в очках или на мониторе ограничено именно вашей FPV камерой.
Я собрал все характеристики курсовых камер в одну таблицу, так что вы можете сравнить их более детально.
Не знаете какую камеру выбрать? Обратите внимание на наш Топ-5 лучших курсовых камер.

Курсовая камера на гоночном дроне
Содержание
- Размер
- CCD и CMOS
- Формат изображения (соотношение сторон)
- FOV
- Динамический диапазон
- Работа при плохом освещении
- TVL
- NTSC и PAL
- Задержка видеосигнала
- Подключение и рабочее напряжение
- Прочие функции
- Можно ли использовать HD камеру в качестве курсовой?
- OSD для полетных данных
Размеры и вес курсовых камер
Размеры и вес камеры определяют то, на сколько легко её можно установить в раму.
В начале развития нашего хобби, курсовые камеры были сделаны на платах размером 32 на 32 мм, безо всякой защиты, без корпусов, их называли «board cameras» (камеры на платах). Все детали торчали наружу и легко повреждались при падениях.
Несколько позже производители решили защищать электронику и добавили пластиковые корпуса.

![]()
Размер камеры определяется её шириной, т.е. расстоянием между крепежными отверстиями, расположенными с разных сторон. В настоящее время доступны следующие размеры:
- стандарт (standard) — 28 мм
- мини (mini) — 21 мм
- микро (micro) — 19 мм
- нано (nano) — все что меньше «микро», обобщенных размеров пока нет

Курсовые камеры: стандартная, мини и микро
Курсовые камеры обычно весят от 4 до 20 грамм.
Существуют камеры типа «все-в-одном» (all in one или AIO), это курсовые камеры с интегрированным видеопередатчиком. Они обычно очень компактные и легкие, однако дают далеко не идеальную картинку. Как правило их ставят на очень мелкие коптеры типа тинивупа (англ), в более крупных дронах нет смысла их использовать.
CCD и CMOS – тип матрицы
CCD и CMOS – это два разных вида матриц, которые используются в камерах, каждый из них имеет свои уникальные характеристики и преимущества.
CCD — более старая технология, раньше такие матрицы были почти во всех курсовых камерах. Сейчас большинство курсовых камер построено на CMOS матрицах, и они постоянно улучшаются. Вот все «за» и «против» CCD и CMOS матриц (англ).
CCD
- Меньше проявляется эффект «желе»
- Меньше шума при плохом освещении
- Лучше управление экспозицией
CMOS
- Обычно меньше задержка видеосигнала (это хорошо)
- Выше разрешение, но больше цифрового шума
- Более натуральные цвета
- Камеры для ночной съемки стали использовать CMOS, а не CCD
- Обычно дешевле, следовательно, самые дешевые курсовые камеры на CMOS матрицах
- Больше подвержены эффекту «желе»
В наши дни CMOS матрицы работают ничуть не хуже, а может и лучше, чем CCD. Я не говорю о том говне, которое можно найти за $10 на Banggood, я про камеры типа Runcam Eagle или Foxeer Predator.
Лично я не думаю, что стоит обращать внимание на тип матрицы, если картинка с неё вас устраивает. Просто почитайте обзоры перед покупкой, посмотрите, как камера ведет себя в разных условиях, при изменении освещения.
Формат изображения (соотношение сторон)
В курсовых камерах используется два формата изображения: 4:3 и 16:9. Этот параметр не имеет никакого отношения к разрешению изображения, это просто форма экрана.

16:9 vs. 4:3
4:3 — это формат старых кинескопных телевизоров, а 16:9 — как у современных компьютеров и HD видео.
Нет такого, чтобы один формат был во всем лучше другого, все зависит от того, какое соотношение сторон поддерживают ваши очки (или монитор). Если у вас камера дает изображение 4:3, но очки имеют экран 16:9, тогда картинка растянется (либо будут черные полосы по краям). Если камера 16:9, а очки 4:3, то картинка будет сжатой.
Поле зрения не всегда зависит от соотношения сторон изображения, т.е. камера 16:9 не факт, что даст более широкий угол, чем 4:3. На самом деле FOV зависит от объектива и размера матрицы, подробнее об этом ниже.
У CMOS матриц обычно соотношение сторон 16:9, а у CCD — 4:3. Некоторые CMOS камеры позволяют выбрать формат 4:3 или 16:9 в настройках, при этом картинка формата 4:3 получается путем обрезания с боков картинки 16:9, т.е. поле зрения уменьшается.
FOV и размер объектива
У объективов для курсовых камер два основных параметра: фокусное расстояние и диаметр резьбы.
От фокусного расстояния зависит угол зрения, чем меньше фокусное расстояние, тем шире угол. Вот небольшая табличка, чтобы примерно представить себе соответствие фокусного расстояния и получаемого FOV.
| Фокусное расстояние | FOV (примерно) |
| 1.8mm | 160° – 170° |
| 2.1mm | 150° – 160° |
| 2.3mm | 140° – 150° |
| 2.5mm | 130° – 140° |
| 2.8mm | 120° – 130° |
| 3.0mm | 110° – 120° |
FOV зависит от комбинации: размер матрицы и фокусного расстояния объектива. На самом деле важнее определить с каким FOV, а не с каким объективом вам комфортнее летать, тогда при покупке камеры вы можете учесть размер матрицы.
Чем шире угол, тем большее пространство поместится в кадре, тем легче летать в тесноте и в гонках. Однако, если FOV очень большой, то картинка будет сильно искажена, это эффект «рыбий глаз». Объекты по середине кадра кажутся меньше и дальше, чем есть на самом деле; а чем ближе к краю, тем больше картинка искривлена.
Лично я предпочитаю угол 130-150 градусов, т.е. фокусное расстояние 2,1 — 2,5 мм.
Вот хороший пример, показывающий разный FOV (от более узкого, к более широкому углу)

На самом деле у большинства камер объективы сменные. Вы можете купить дополнительные объективы и попробовать их, вместо покупки камеры целиком. Вот в этой статье я пробую разные объективы для камеры Runcam Swift, там есть и примеры изображений.

Объективы для курсовых камер бывают двух размеров: с резьбой M8 и с резьбой M12. M12 — более крупные и более тяжелые. Они обычно используются в камерах размера стандарт и мини. В такие объективы попадает больше света, поэтому картинка обычно лучше, чем у объективов M8. У M8 другое преимущество — они очень компактные, поэтому их используют в микро- и нано- камерах.

Динамический диапазон (WDR)
Wide Dynamic Range (WDR) или расширенный динамический диапазон — это технология, которая позволяет улучшить изображение при экстремальных условиях освещения, когда в кадре есть и очень яркие и очень темные объекты.

Динамический диапазон курсовых камер
Как видите, на первой картинке изображение недоэкспонировано, хорошо видно солнце, облака, но деревья и трава черные. Правая картинка переэкспонирована, деревья видны, а вот небо выбелено. Средняя картинка показывает широкий динамический диапазон, комбинацию нескольких изображений: вы можете видеть и деревья, и облака.
Как только вы поймете идею WDR, так сразу начнете ценить эту функцию в курсовых камерах, т.к. именно она помогает значительно лучше видеть окружающее пространство. WDR есть у многих камер, но качество очень сильно отличается.
Работа при плохом освещении
Если вы планируете летать внутри помещений, на закате/рассвете или даже ночью, тогда вам нужно многое узнать про работу FPV камер в этих условиях. Некоторые камеры специально разрабатываются ночных полетов.

Вот моё недавнее сравнение нескольких современных FPV камер.
Возможность работы при плохом освещении можно оценить в люксах (lux). Чем ниже значение, тем лучше. Например, Runcam Swift 2 работает при минимальном освещении 0.01 лк, а Runcam Eagle 2 при 0,0001 лк, и, конечно, у Eagle 2 при плохом освещении картинка лучше, чем у Swift 2.
Учтите, что как правило камеры с физически более крупной матрицей лучше работают при плохом освещении, т.к. на матрицу попадает больше света.
Большинство курсовых камер работает в автоматическом (день/ночь) режиме. В этом случае камера сама выбирает передавать цветное или черно-белое изображение (в зависимости от условий освещения). В «Ночном режиме» (night mode) мы видим черно-белую картинку, если при этом на камере нет ИК фильтра, то картинка будет значительно лучше.
NTSC и PAL – стандарты кодирования видео
Важно ли выбрать «правильный» формат? И да, и нет.
Разница между PAL и NTSC в разрешении изображения и частоте кадров. PAL дает бОльшее разрешение, в то время как NTSC – больше кадров в секунду. Так что если вам нужно отличное изображение, то лучше использовать PAL. Но если вы хотите более плавного видео – тогда лучше выбрать NTSC.
- PAL: 720 x 576 @ 25fps
- NTSC: 720 x 480 @ 30fps
Подробнее читайте тут (англ).
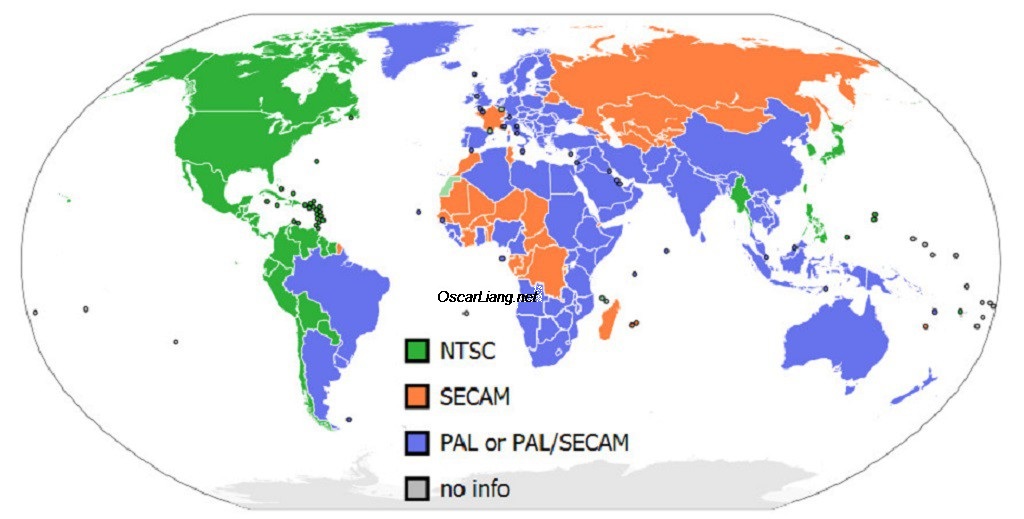
NTSC используется в северной Америке, Японии и Южной Корее. PAL используется в большей части Европы, Австралии, и значительной части Африки и Азии. Не плохо выбрать стандарт как в вашей стране. Но я не думаю, что будут какие-то проблемы, если вы выберите другой стандарт, т.к. FPV оборудование поддерживает оба формата.
Внимание, в настройках Betaflight OSD нужно выбрать тот же формат, что и на камере, иначе OSD не будет отображаться.
Разрешение камеры – TVL – телевизионные линии
TVL (TV Lines) — это параметр, характеризующий разрешение аналоговых камер.
Число – количество черных и белых линий, которые могут быть отображены на картинке горизонтально. Камера 600TVL может отобразить 300 черных и 300 белых линий поочередно в одном кадре. Наиболее часто встречаемые камеры имеют 380, 480, 540, 600, 700, 800, 1200 TVL.
Однако, не всегда «больше значит лучше», из-за ограничений, накладываемых аналоговым видео передатчиком 5.8ГГц: имеется лимит на объем передаваемых данных, так что качество может быть урезанным. Например, в аналоговом сигнале 1200TVL — это не удвоенная резкость изображения по сравнению с 600TVL.
Нет простого способа проверить корректность описания камеры, TVL заявленное производителем. Но не слишком переживайте по этому поводу, т.к. основной критерий — это качество изображения.
Задержка видеосигнала
Процесс захвата и обработки изображения камерой занимает какой-то время, перед его отправкой сигнала в видеопередатчик. Эта задержка меняется от камеры к камере, и зависит как от примененного железа, так и от прошивки камеры.
Задержка сигнала — важный критерий выбора камеры для гоночного дрона и вообще для быстрых полетов. Чем ниже задержка видеосигнала, тем быстрее пилот будет реагировать.
Представьте, что вы летите со скоростью 100 км/ч, а задержка сигнала — 50 мс (0,05 с), т.е. ваш коптер пролетит 1,4 метра, прежде чем вы сможете отреагировать, т.е. вы можете не заметить препятствие и врезаться.
Задержку сигнала обычно не указывают в характеристиках, так что я постарался как можно точнее измерить её у разных камер.
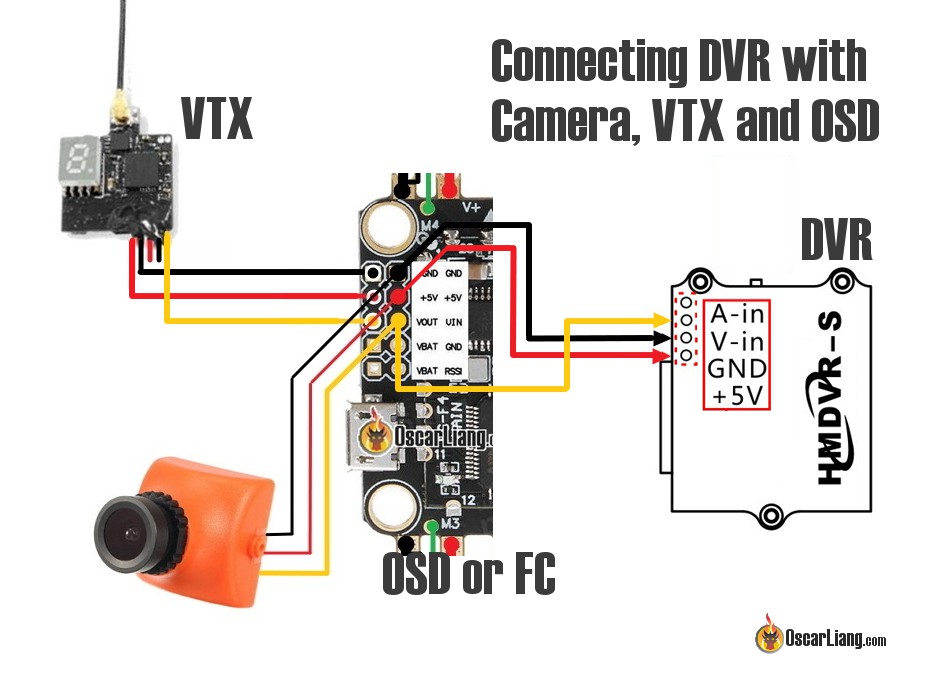
Подключение и рабочее напряжение
Подключение камер, как правило, очень простое, всего 3 провода. Красный – это «плюс» питания, черный – «земля», желтый – видео сигнал. В зависимости от функционала камеры могут быть и другие контакты:
- Питание (Power)
- Земля (Ground)
- Видеосигнал (Video Signal)
- OSD/Menu – чтобы подключить джойстик для изменения настроек камеры
- VBat/VSen – для подключения аккумулятора, чтобы мониторить его напряжение
- Звук (Audio Signal) – если у вашей камеры есть микрофон

Большинство продаваемых в настоящее время камер имеет широкий диапазон входного напряжение, что-то типа 5 — 36 В. Это позволяет питать камеру как через стабилизатор, так и напрямую от Lipo аккумулятора (2S — 8S).
Есть кое-какие правила и рекомендации по подключению FPV оборудования (англ), чтобы получить картинку без помех.
Настройки камеры
Чтобы попасть в меню настроек камеры используйте джойстик, который поставляется с камерой.

Спасибо разработчикам прошивок, теперь мы можем настраивать камеру прямо с пульта управления, подключив её к полетному контроллеру. Т.е. вы можете поменять настройки без доп. джойстика, где угодно и когда угодно.
Вот руководство по настройке такого управления, через контакт OSD.
Можно ли использовать HD камеру в качестве курсовой?
Те ролики, который вы смотрите на Youtube, сняты на HD экшн камеры типа GoPro или Runcam 3, это дополнительные камеры на коптерах.
Некоторые из этих HD камер выдают видеосигнал наружу, и вы можете передавать его на землю при помощи видеопередатчика. К сожалению, задержка видеосигнала очень большая и не подходит для полетов (обычно более 100 мс). С такой задержкой вы вероятнее всего разобьете коптер до того, как изображение препятствия дойдет до очков.
Я всегда советую использовать отдельную курсовую (FPV) камеру для полетов, а HD камеру — только для записи. Учтите, чтобы не запутаться с пространственной ориентацией, не нужно ставить курсовую камеру на стабилизированный подвес.
OSD для полетных данных
Немного не в тему, но я уверен, что есть не мало людей, которым интересно что такое OSD. Кратко: OSD – это устройство, которое отображает текст/данные поверх картинки, идущей с камеры.
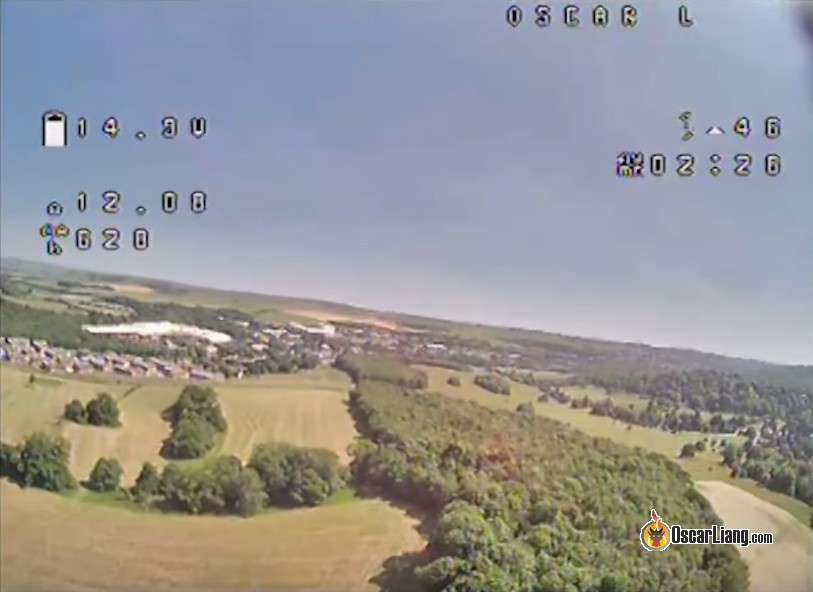
OSD — очень полезное устройство. Вы сможете увидеть разного рода данные: напряжение аккумулятора, таймер, RSSI, потребляемый ток и т.д. Многие современные полетные контроллеры уже имеют встроенное OSD, так что настройка очень простая.
Вы сделали это!
Надеюсь, это руководство поможет вам выбрать следующую курсовую камеру. Не стесняйтесь спрашивать в комментариях. Приятных полетов!
История изменений
- Декабрь 2014 — первая версия статьи
- Ноябрь 2016 — обновление раздела CCD vs CMOS, добавлена информация об OSD и размерах камер
- Май 2018 — добавлена информация об управлении камерами
- Ноябрь 2018 — добавлена информация о полетах при плохом освещении
В первый раз встретил такую простую и толковую статью! Большое Вам спасибо!
Пожалуйста.
Заходите чаще.
Посоветуйте какую камеру купить для FPV и для обычной съемки стоймостью до 10000₽
Давайте для начала уточним, камеру HD или курсовую?
Посоветуйте хорошую курсовую камеру на мини самолет что бы видно было кусты и мелкие детали,а то обидно каждый раз за что то цыпляться !
Если мелкую и из нового, то Runcam Swift Mini: https://blog.rcdetails.info/kratkij-obzor-fpv-kamery-runcam-swift-mini/
CMOS
Лучше цвета
Кто вам такую чушь сказал?
Лично я (переводчик) с этим не до конца согласен, просто потому что застал в профессиональных фотоаппаратах и CCD и CMOS матрицы и, по началу, CCD были лучше; но CCD остановились в развитии, можно сказать что умерли. Поэтому CMOS догнали, а местами перегнали CCD.
В любом случае фраза о том, что цвета CMOS матриц лучше, чем у CCD, имеет право на жизнь.
Хотел бы согласиться, но эффект желе в CMOS (еще какие-то новые есть, не помню, как называются, хотя они, скорее, старые) так и остался. Фотоаппарат снимает видео 120fps, эффект желе есть. Ну как так? Да, стал меньше, но есть. Есть, прямо скажу, плохой фотоаппарат Olympus. Почему есть? Из-за матрицы CCD и видео. Поэтому там, где этот эффект нежелателен, выбираю CCD. Сейчас купил камеру Eachine 1000TVL CCD, но ощущение такое, что это CMOS. Цвет неестественный, ощущение, что эффект желе есть (хотя может из-за широкоугольного объектива так кажется), вообще расстроен её покупкой. Мало того — пишу с неё видно непосредственно на видеорекордер 1270х720, ощущение что там 640х480. В общем, какая-то неоднозначная камера. На 3-х простеньких квадриках стоят cmos (2 из них fpv). Как-то не очень приятно. На всех 3. Был 4-й, тоже с cmos — cmos это плохо, даже цена не спасает. Отдельно купленные все CCD, вот только Eachine вызывает большие сомнения.
1000TVL — это ведь разрешение матрицы, а не аналогового сигнала. У PAL разрешение 720 х 576.
Высокое разрешение матрицы нужно для того, чтобы получить более резкую картинку; если разрешение матрицы будет как у выходного сигнала, то часть деталей пропадет. Не забываем про фильтр Байера, поэтому реальное попиксельное резрешение камеры всегда меньше заявленного (это не обман, это просто разные способы измерения).
«с физически более крупной матрицей » — ну и как это узнать?
В описаниях камер обычно указывается размер матрицы, например, 1/2.5 или 1/3
Добрый день.
На сегодняшний день 28072020 использую эту камеру
https://aliexpress.ru/item/32738863196.html?spm=a2g0s.9042311.0.0.264d33edOrEeha&_ga=2.234186462.1528606059.1595832920-118139006.1577715462
Скажите чем лучще или хуже использовать без встроенного передатчика , посоветуете ли вы мне чтото лучше на сайте алиэкспрес?
Если да, то прошу выслать ссылки и на передатчик
Мой дрон MJX Bugs 8 pro
Начать можно отсюда: https://blog.rcdetails.info/top-5-luchshih-kursovyh-fpv-kamer-dlya-mini-kopterov/
Качество картинки будет заметно лучше, чем с вашего комбо-набора.
Как вариант — можно попробовать подключить новую камеру взамен старой (у вас две платы — камера и видеопередатчик), но тут надо уметь работать руками и паяльником, тогда не придется тратиться на видеопередатчик.
Учтите, чтобы не запутаться с пространственной ориентацией, не нужно ставить курсовую камеру на стабилизированный подвес. Почему
Если летать высоко и далеко — то это не критично, но все равно теряется ощущение полета. Если низко и вблизи разных препятствий, тогда будет очень тяжело.