
Полетный контроллер Frsky R9MM — это Airbot OmniNXT F7 со встроенным приемником R9MM. Я собираюсь его протестировать и выяснить все преимущества такого решения. Также я покажу вам как обновить прошивку в приемнике.
Оригинал: Review: Frsky OmniNXT F7 FC with Built-in R9MM RX
Думаю ранкамовцы правильно сделали, что за основу взяли полётник Airbot OnmiNXT F7. Я советовал к нему присмотреться в топ-5 лучших ПК, у него отличный функционал, удобное расположение контактов и качественная сборка.
Дополнительная информация: подробно про выбор полетного контролера для коптера
Где купить?

R9MM размещается снизу основной платы и защищен пластиковым корпусом. Специально для этого контроллера инженеры заново развели плату приемника.
Антенный провод длиной примерно 10 см.
Стоит ли он своих денег?
На момент написания статьи Airbot OmniNXT F7 стоит $61,2 (например тут), а приемник R9MM — ещё $20 (вот тут).
Антенна — диполь, стоит $3.
Если смотреть только на цену комплектующих, то его цена адекватна. Если у вас нет модуля Frsky R9M, тогда, наверное, лучше посмотреть на OmniNXT F7 без встроенного приемника.
Характеристики и возможности OmniNXT F7
- Процессор: серии F7 (вот тут про преимущества)
- Два гироскопа: MPU6000 и ICM20608 (описание разных гироскопов)
- Напряжение питания: 3S — 6S LiPo
- BEC: 3.3V@0.2A, 5V@1A, 8V@1A (LC фильтр)
- 6 UART (но у UART 5 только контакт RX)
- Поддержка управления курсовыми камерами (через контакт OSD на камере)
- Поддержка Betaflight OSD
- Разъем для регуляторов 4-в-1, с телеметрией
- 8 выходов на моторы (TX6 и RX6 можно переназначить на моторы 7 и 8)
- 16 МБ памяти для Blackbox
- Порт i2c
- Расстояние между монтажными отверстиями: 30,5 х 30,5 мм
- Вес: 14 грамм (включая приемник и антенну)
- Прошивка: Betaflight OmniNXT7 (ONX7)
На плате установлено две микросхемы с гироскопами, обе в пластиковом корпусе, с защитой от вибраций, так что демпферы для крепления всего полетника не нужны. Замечу, что работать будет только один гироскоп, нужный тип выбирается в консоли (по умолчанию работает MPU6000)
set gyro_to_use = SECOND save
- FIRST = MPU6000
- SECOND = ICM20608

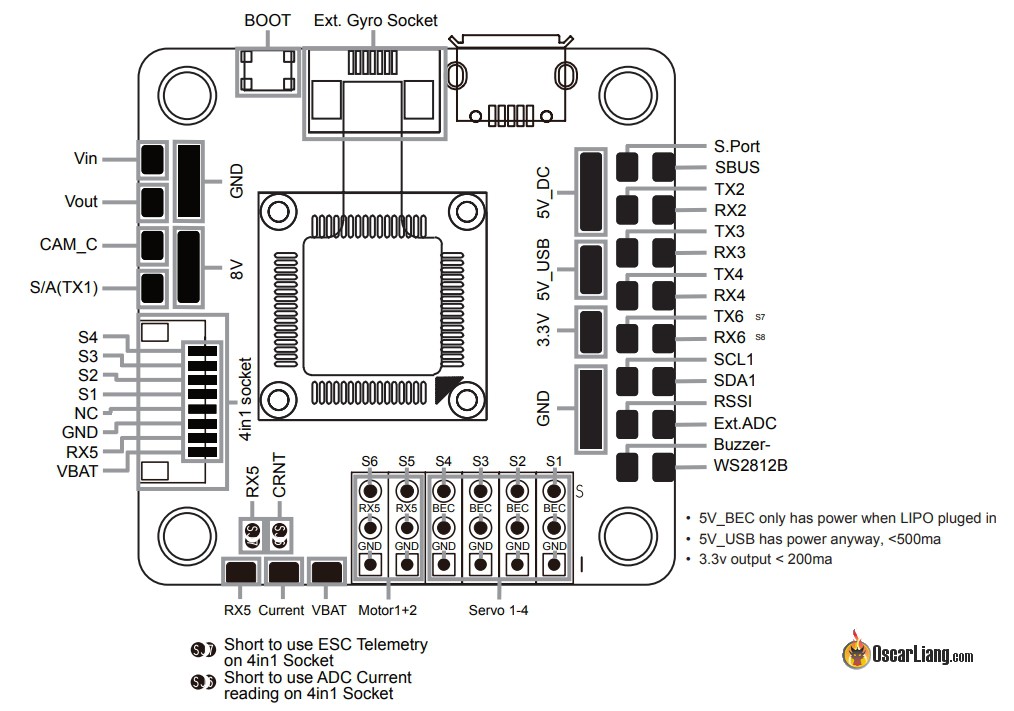
Расположение элементов на плате довольно удобное, контакты сгруппированы по выполняемым функциям. Очень понравилось, что они сделали контакты для 5 В, 8 В и земли довольно крупными, так значительно проще паять.
OmniNXT F7 разработан для работы с регуляторами типа 4-в-1, но есть и сквозные отверстия для подключения отдельных регулей, туда же можно припаять штыревые разъемы. Т.е. полетник подойдет для летающих крыльев и прочих самолетов, а не только для коптеров.
Выходы на моторы S1 — S4 имеют центральный контакт с меткой «BEC», они соединены между собой, и изначально больше ни к чему не подключены. На плате есть два джампера, закоротив пайкой один из них, вы подключите «BEC» к линии 5В; другой — к RX5. Пятивольтовая линия позволит питать сервы, хотя мощности встроенного BEC может не хватить (макс. 1А), поэтому лучше питать сервы от внешнего источника. При подключении к RX5 вы сможете использовать телеметрию с регуляторов скорости.
Благодаря тому, что на плате есть 8 выходов на моторы, вы сможете использовать полетник на гекса- и октокоптерах.
Что касается датчика тока: если вы используете разъем для регуляторов 4-в-1, тогда нужно закоротить одну из двух перемычек около него. Т.е. вы сможете выбрать использовать ли телеметрию с регуляторов или АЦП для измерения тока.
Рядом с контактом 5В есть RGB светодиод, я пока не знаю, что с ним делать и как его настроить.


Как биндить приемник?
Шаги те же самые, что и в случае с отдельным приемником Frsky: переходим в режим привязки (bind mode) нажав кнопку и удерживая её при включении питания.
Эта кнопка расположена на приёмнике, а в пластиковом корпусе напротив неё есть небольшое отверстие.
Что хорошего во встроенном приёмнике?
Приёмник подключен к контроллеру через UART2 по протоколу FPort. Очень удобно, что он уже прикручен, подключен и сразу готов к работе. Однако процесс обновления прошивки не совсем очевиден.
От FrSky я узнал, что есть отдельная, специальная прошивка для этого приёмника. Если вы будете использовать оригинальную прошивку R9MM, то могут возникнуть проблемы с подключением к ПК. Последний раз, когда я проверял их сайт (5 февраля 2019) FLEX прошивки всё ещё не было, так что прошивки для этого приемника немного запаздывают относительно прошивок для обычных R9MM.
Как обновить прошивку встроенного приёмника R9MM?
В принципе, процедура обновления такая же, как и в случае с обычными приёмниками. Но вначале нужно вытащить R9MM из пластикового корпуса, открутив 4 длинных винтика.
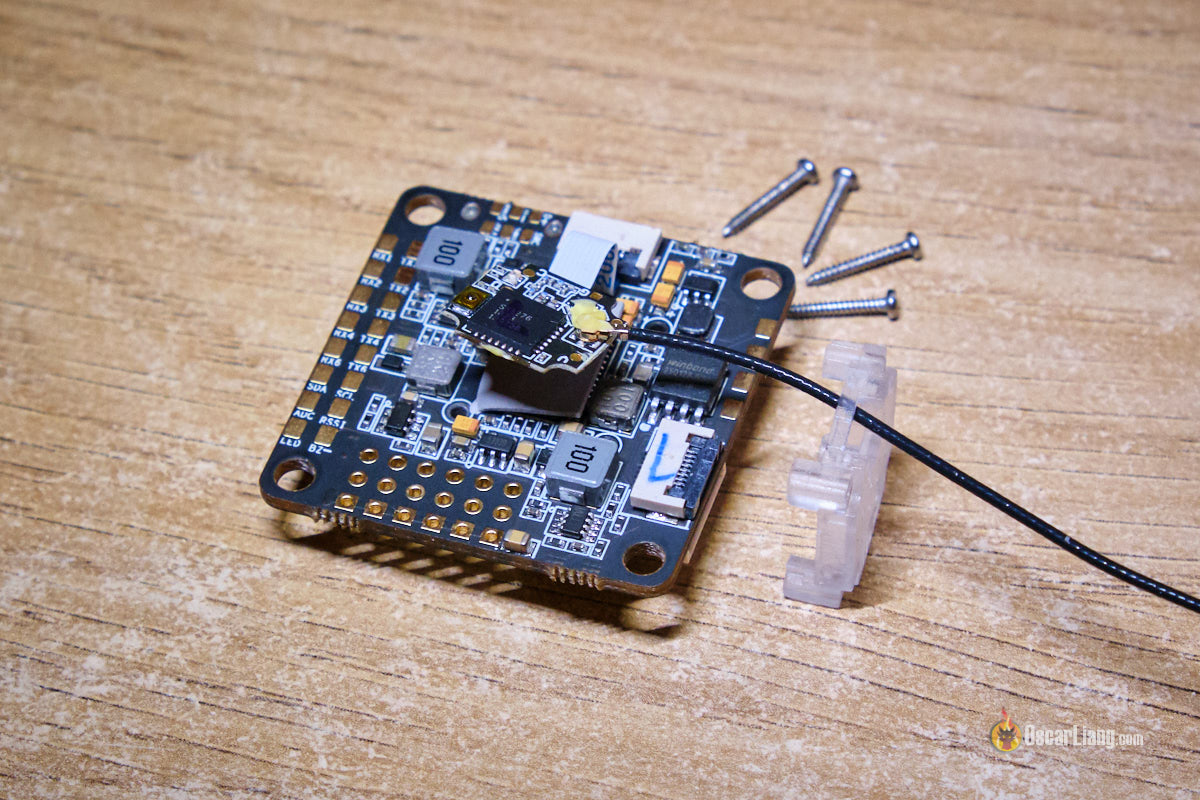
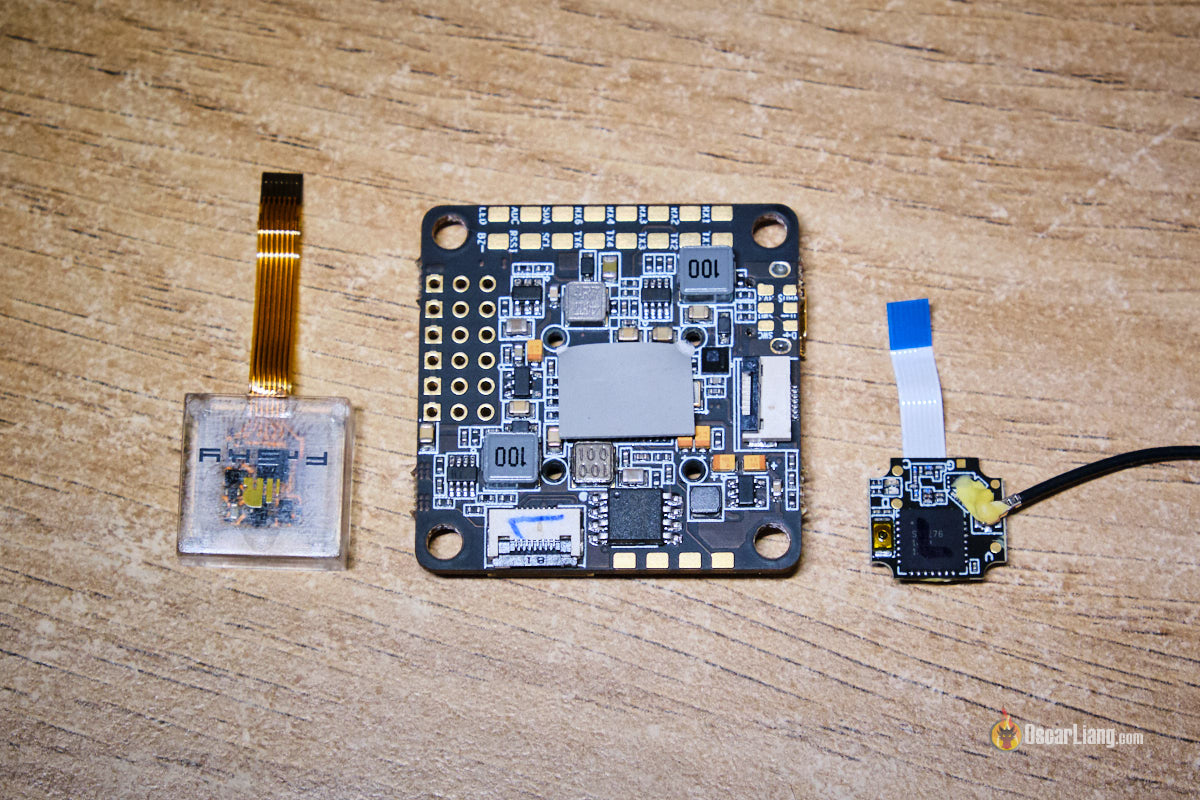
Отсоединяем шлейф. И гироскопы, и приемник легко снимаются с полетного контроллера.
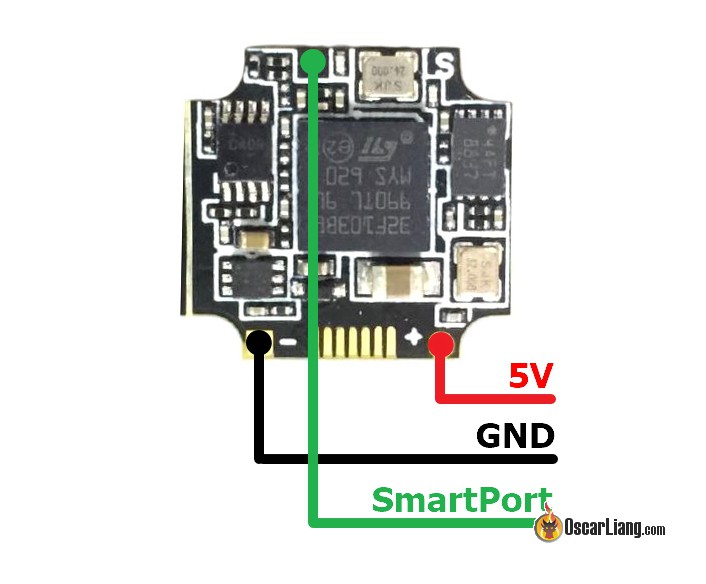
Припаиваем сервокабель к трем площадкам на приемнике: питание, земля и SmartPort.

Прошивку скачиваем тут: https://www.frsky-rc.com/r9-mm-fc-omninxt-f7/
Дальше поступаем также, как и с обычным приемником: подключаем серворазъем в Таранис и прошиваем 🙂 Вот подробная инструкция (англ).
Ещё один способ подключения приемника к полётному контроллеру
Я случайно повредил кабель между ПК и приёмником. Т.к. замены для шлейфа нет, пришлось использовать несколько тоненьких проводков, что натолкнуло меня на мысль, что есть более надежный и удобный способ подключения приёмника к контроллеру.

Это провода калибра 30AWG, подключенные к контактам Vin (питание), GND (земля) и к SmartPort на приемнике.
SmartPort подключаем к TX2 на полетнике (этот же контакт используется в шлейфе).

Почему так лучше?
Во-первых, в этом случае не нужна специальная прошивка для приемника! Теперь я могу использовать обычную прошивку безо всяких проблем с передачей информации от приемника к полетному контроллеру. В таком виде это обычный R9MM, можно использовать Flex 🙂
Во-вторых, больше не потребуется снимать пластиковый корпус для того, чтобы обновить прошивку, отпаиваем провода от ПК и используем их для прошивки. кстати, провода прочнее, чем шлейф.
И, в-третьих, так проще искать и решать проблемы с приемником. При использовании шлейфа сложно найти, где пропал контакт. Теперь можно легко подключить приемник к другому последовательному порту!
Т.к. SmartPort имеет инвертированный сигнал, придется дать ещё одну команду в консоли:
serialrx_inverted = ON save
Советы по сборке — высота стека
По началу не обращаешь внимание на высоту платы. Из-за пластикового корпуса, приемника и гироскопов она несколько больше, чем у других полетников.
По моим измерениям получилось примерно 14 мм!
Убедитесь, что в вашей раме достаточно места.
Больше информации?
Дайте знать, если у вас есть вопросы. Я планирую использовать этот ПК на новом коптере, скоро опубликую об этом пост. 🙂