
Holybro Kakute F4 — это полетный контроллер все-в-одном: плата распределения питания (PDB) и OSD. В этом обзоре мы рассмотрим его функционал и протестируем на миникоптере.
Оригинал: Review: Holybro Kakute F4 AIO FC
Купить Kakute F4 можно на Banggood.
После того, как попробовал ПК Betaflight F3 я влюбился в контроллеры «все-в-одном». Всего одна плата на весь квадрокоптер — это аккуратная сборка и простота ремонта. Так что я с нетерпением ждал Kakute F4 AIO от Holybro. Не говоря уже о том, что это мой второй ПК на F4.
Чтобы больше узнать про полетные контроллеры, читайте руководство по выбору ПК.

Что особенного в Holybro Kakute F4 AIO FC?
Первое, на что я обратил внимание — это гироскопы.
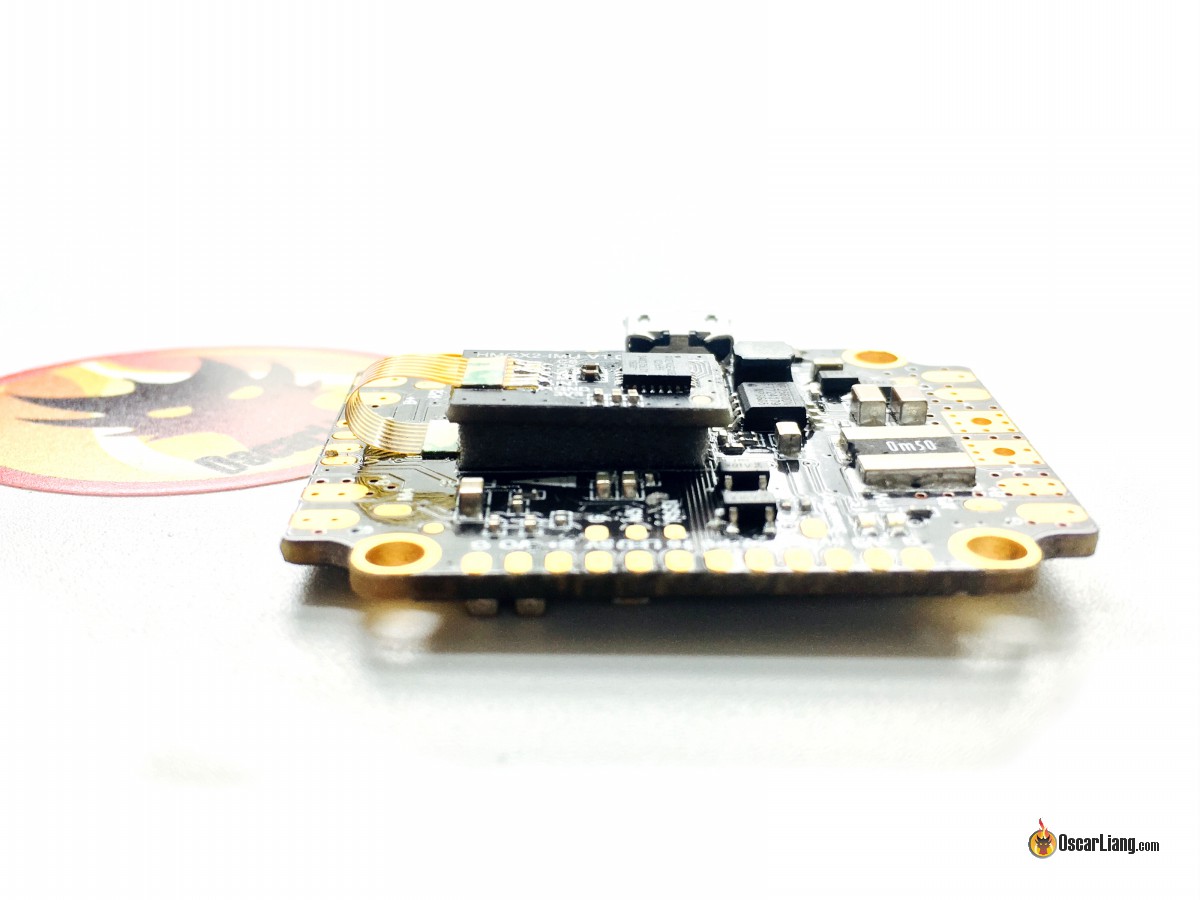
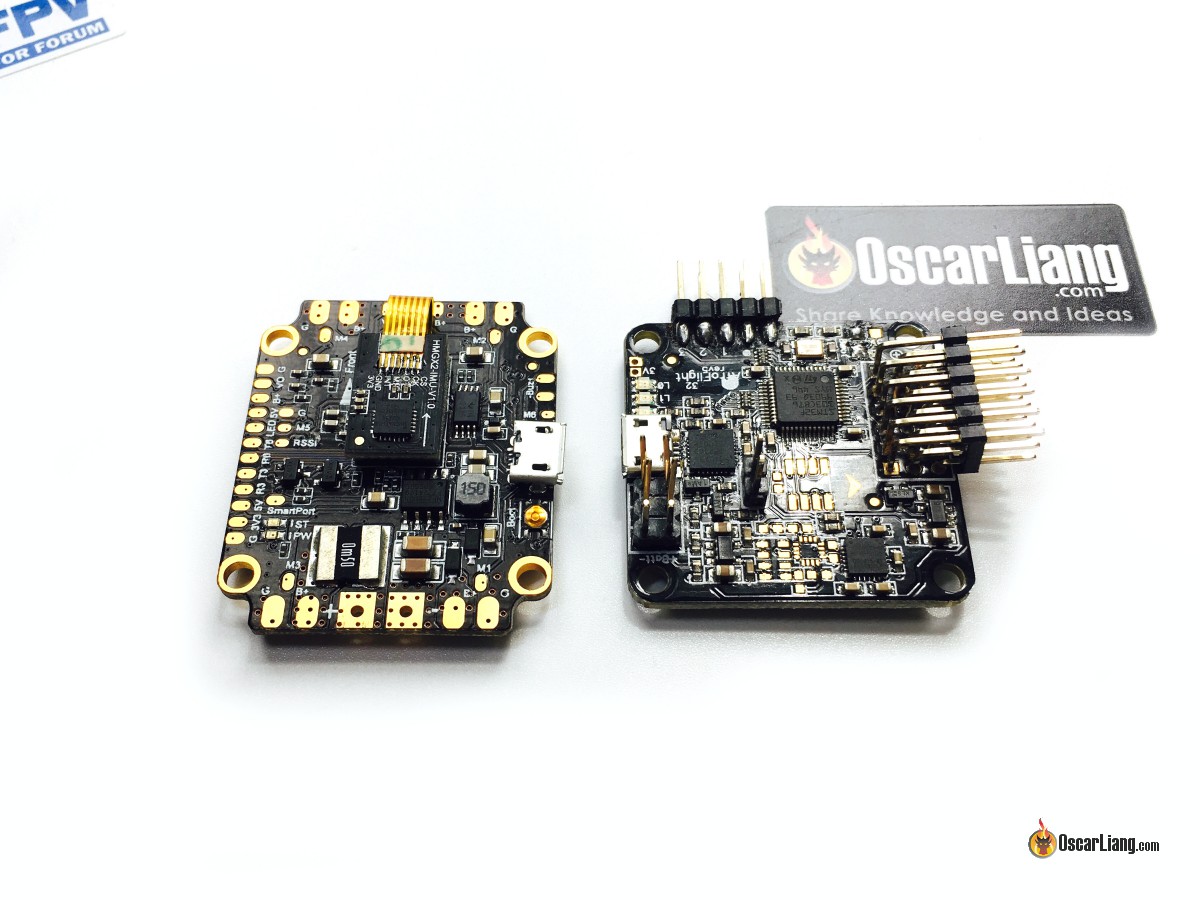
Это первый полетный контроллер у которого имеется софтмаунт (антивибрационное крепление) датчиков, так что нет необходимости использовать софтмаунт для всего ПК или моторов.

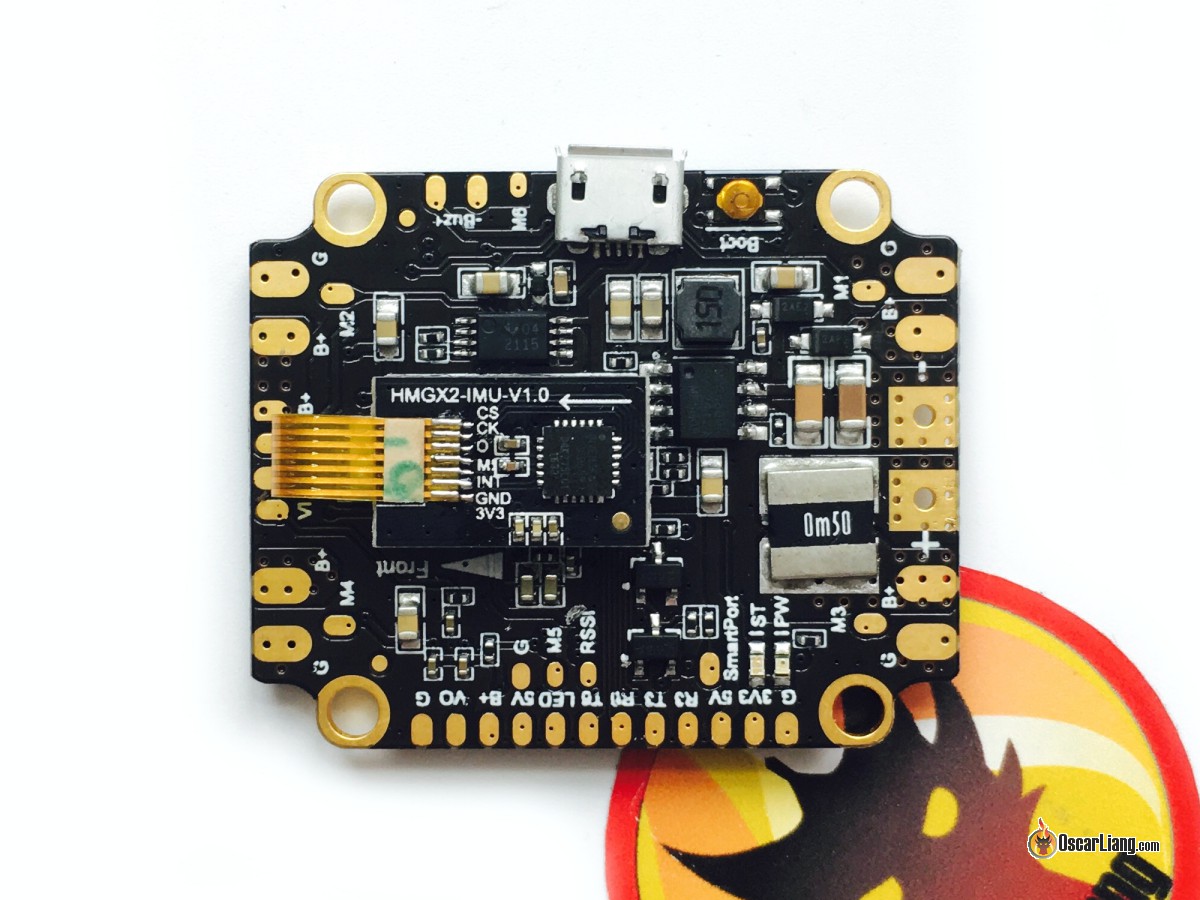
На Kakute датчики вынесены на отдельную плату, которая крепится к основной плате через губку и соединяется плоским шлейфом. Шлейф на вид довольно хрупкий, возможно потребуется дополнительная защита от повреждений при падениях. В любом случае, в комплекте идет запасной шлейф и поролон.
Кроме того, стоит задуматься об эффективности гашения вибраций потому что вес платы очень маленький. Посмотрим на результаты тестов.

В качестве датчиков не привычный нам MPU6000, а высокопроизводительный ICM20689, который может работать с частотой сэмплирования до 32 кГц. Не совсем такой же, но похожий использовался в Raceflight Revolt V2. В настоящее время, при использовании Betaflight большого преимущества нет, но в будущем, когда мы перейдем к более высоким частотам опроса датчиков — Kakute F4 еще пригодится.
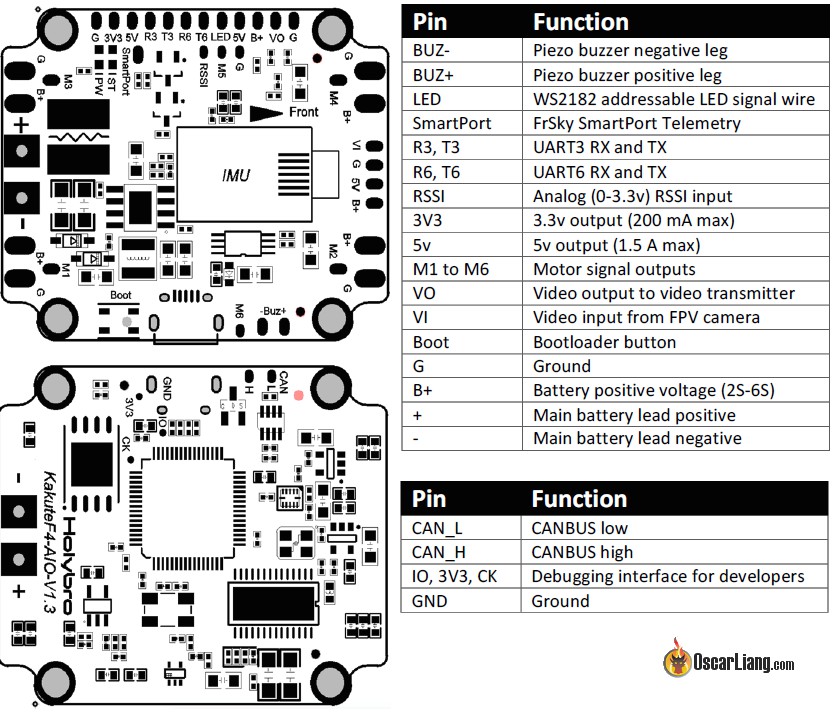
Если не считать гироскопов, то у Kakute такой же функционал, как и у Betaflight F3, включая Betaflight OSD и PDB. OSD позволяет пилоту менять настройки и ПИД при помощи стиков. Можно даже менять настройки видео передатчиков типа Tramp или Unify Pro.
Подытожим:
- Софтмаунт датчиков
- Частота опроса гир до 32 кГц
- Наличие Betaflight OSD и PDB
Характеристики Kakute FC
- Процессор F4 (различия между F1, F3, F4 и F7)
- Датчики ICM20689 на шине SPI
- 3 аппаратных UART порта
- 16 МБ флэш памяти для Blackbox
- Встроенное OSD
- PDB со стабилизатором 5 В / 1,2 А
- Макс ток через PDB: до 120 А
- Кнопка загрузчика
- Напряжение питания: 7 — 42 В (до 6S)
- Встроенный датчик тока
- Разработан для Betaflight, для прошивки выбирать таргет “KTV1” (KAKUTEF4)
Holybro выпустили ПК «все-в-одном» на F3 в октябре/ноябре 2016 года, а это новая проапгрейженная версия, так что мы вправе ожидать довольно зрелый продукт, разработанный на основе имеющегося опыта.

Что я о нем думаю
Собран аккуратно, небольшой нюанс — датчик тока припаян не очень ровно. Я проглядел и другие обзоры в интернете, похоже, что у всех так.
Полетный контроллер автоматически обнаружился при подключении ко компьютеру с Windows 10, драйвера установились сразу. В Kakute F4 уже предустановлена прошивка Betaflight V3.20.
- Плата поддерживает SmartPort телеметрию прямо из коробки, безо всяких модов и инвертеров (как было у ранних ПК на F4).
- Нет контактов для земли от регулей.
- Kakute F4 не работает с PPM/PWM приемниками, только SBUS, iBus, Spektrum satellite и т.п.
- Нет выхода 12 В, так что для питания внешних устройств Kakute F4 не подойдет. Придется выбирать: брать питание от аккумулятора или стабилизированные 5 вольт. Со стабилизатором не очень понятно — на странице товара написано, что макс. ток составляет 1,5 А, но в инструкции он указан как 1,2 А.
- Отличная инструкция
Несмотря на то, что это плата «все-в-одном» с кучей функций, она не выглядит массивной по сравнению с другими ПК, вот сравнение с Naze32:
Сборка, тестирование и т.д.
Скоро.
Купить на Banggood.