
Наконец-то у меня есть полётник CL Racing F7! Мне очень нравилось летать на F4, так что я с нетерпением ждал обновленную версию. У F7 такое-же очень удобное расположение элементов и дополнительно есть несколько офигенных вещей, которые мы и рассмотрим в этом обзоре.
Оригинал: Review: CL Racing F7 Flight Controller
Дополнительная информация: топ-5 лучших полетных контроллеров для квадрокоптеров
Что особенного в CL Racing F7?
Я только недавно получил плату, поэтому ничего не могу сказать о её надежности. Но пока всё отлично. У CL Racing F7 самое продуманное и логичное расположение разъемов и контактных площадок из всего что я видел!
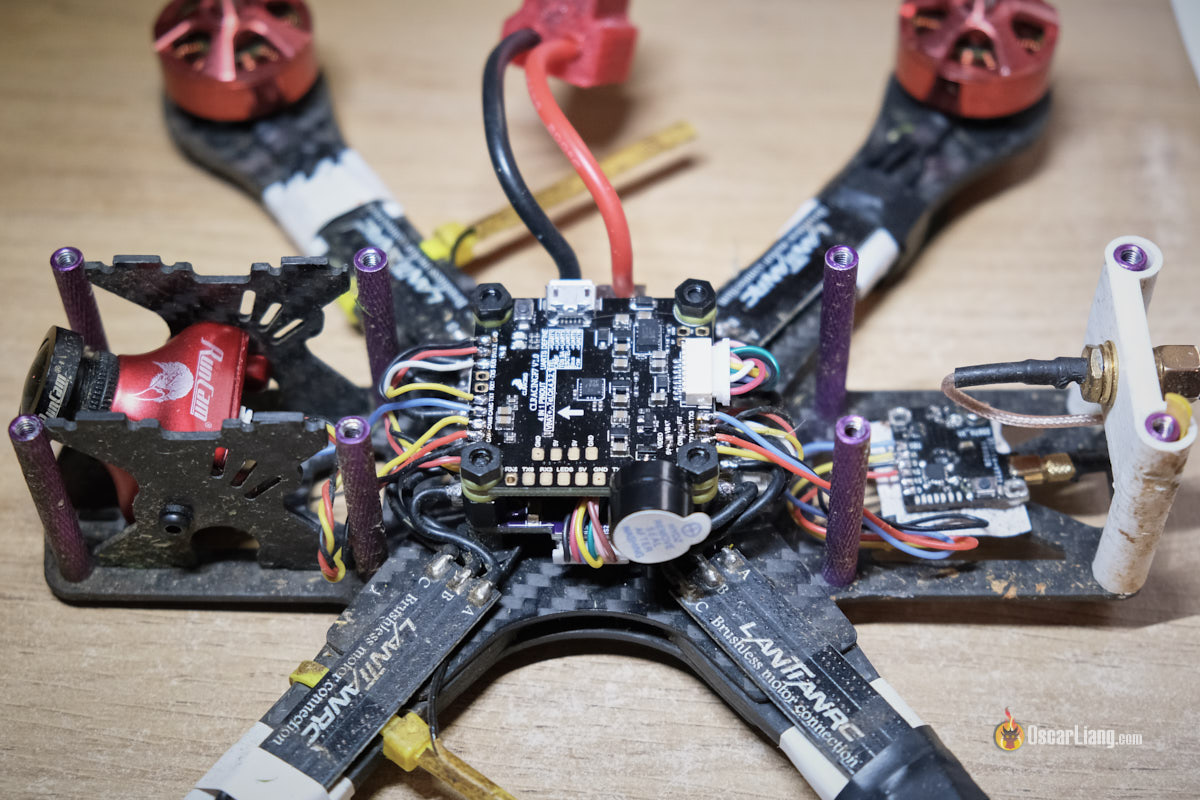
Питание камеры, сигнал и разъем управления — спереди, а разъемы для видеопередатчика — сзади, рядом с перемычками для выбора напряжения питания камеры и видеопередатчика. Все контакты расположены с краю платы, так что провода не пересекаются и не перемешиваются, а обычно бывает спагетти из разных проводков.
Полетник рассчитан на использование с регуляторами «4-в-1», поэтому в нем нет PDB. Если хотите использовать отдельные регуляторы, тогда будет нужна внешняя PDB.
Где купить?
Вместе с полетным контроллером в комплекте идет кабель для регуляторов, запасные резиновые шайбы для демпфирования ПК.
Учтите, что в комплекте нет ни стоек, ни крепежа; лучше купите всё с запасом.

Характеристики CL Racing F7
- STM32 F722 MCU
- Гироскопы ICM20602 Gyro – частота сэмплирования до 32 кГц
- BEC: 5V@1.5A, 3.3V@250mA
- Напряжение питания: 2S — 8S LiPo (до 36 вольт)
- 1 Гигабит флэшпамяти для Blackbox
- Поддержка режима pitMode
- 6 последовательных портов (UART)
- Защита от переполюсовки
- 5 выходов на моторы
- Управление курсовой камерой
Есть кое-какие новшества. На самом деле я до конца не уверен, возможно кто-то уже делал подобное, но в полетных контроллерах это применяется впервые.
1 Гигабит памяти для Blackbox?
Лично я считаю, что для Blackbox лучше использовать микросхемы флэшпамяти, это более удобно, чем MicroSD карточка. Места на плате занимает меньше, а также уменьшает её высоту. К сожалению, часто ставят 16 мегабайт, а это маловато…
На полётнике CL Racing F7 стоит 1 гигабит, т.е. 128 мегабайт, этого с лихвой хватит для логов Blackbox. Допустим у вас частота 4к, а длительность полета 4 минуты, тогда этой памяти хватит примерно на 15 полетов.
PitMode
PitMode — это режим видеопередатчика, в котором выходная мощность близка к 0, в этом случае меньше шансов помешать пилотам, который в данный момент летают.
Теперь есть возможность включить/выключить видеопередатчик тумблером на аппе.
Пищалка, припаиваемая на плату
Не знаю намеренно это сделано или нет, но между контактами для пищалки расстояние такое, что её можно припаять без дополнительных проводов.
Так можно сделать, если на раме есть место, но в любом случае, довольно удобная штука.
Управление камерой
Подключив контакт CAMC на ПК к контакту OSD курсовой камеры, мы получаем возможность управлять камерой при помощи стиков пульта! Раньше, подключение и настройка этого функционала были не простыми задачами, хорошо, что в этом ПК часть задач решена.
Ничего не пришлось доделывать, я просто подключил провод к Runcam Eagle 2 и все заработало!
Детальное описание CLRacing F7
Очень нравится расположение элементов на плате! В комплекте с ПК дают ярко желтые шайбы (фирменное отличие) для антивибрационного крепления платы (демпфер).

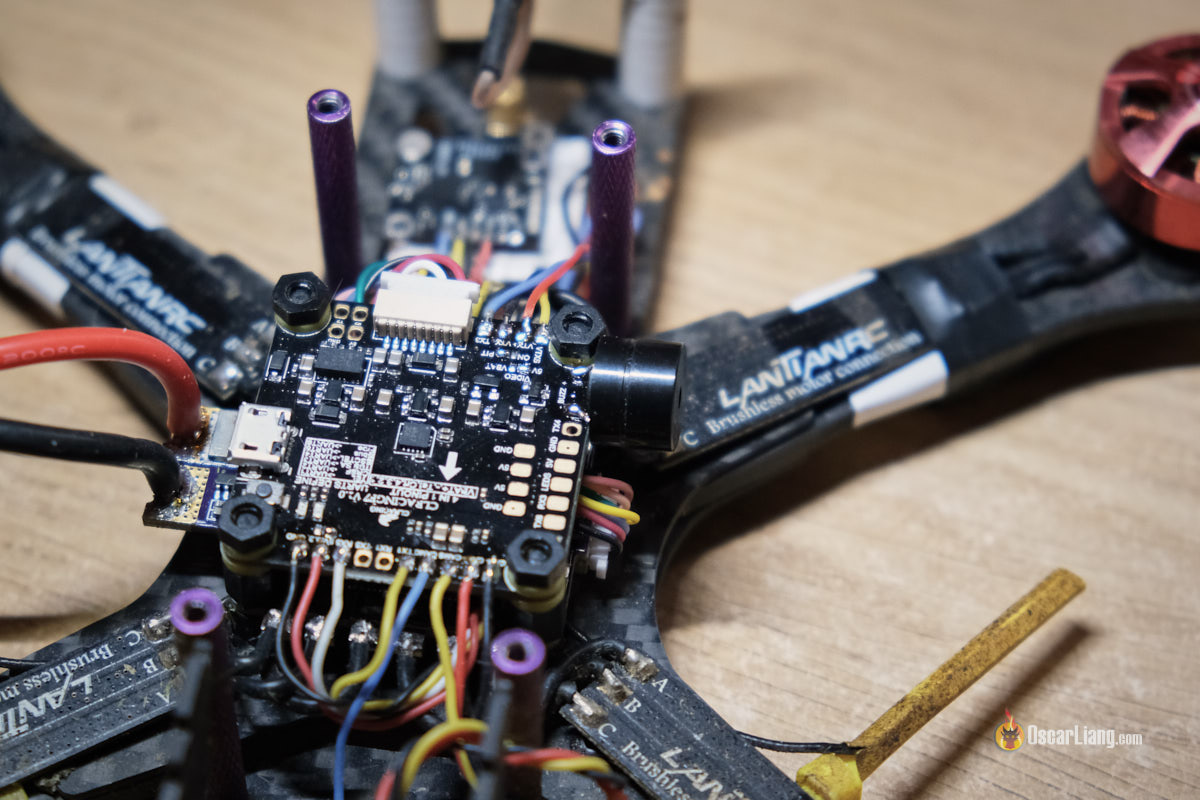
Все контакты доступны с обеих сторон платы, поэтому разводка проводов и пайка — довольно простой процесс. Чип памяти (1 Гбит) расположен справа снизу, и по размерам он заметно больше, чем старый на 16 мегабайт.
Качество сборки просто превосходное.

Сборка
Для начала гляньте инструкцию.
Затем подключите регуляторы 4-в-1, дважды… нет… трижды проверьте порядок проводов! Даже лучше проверьте каждый провод мультиметром, чтобы убедиться, что не спалите электронику при включении.
При подключении приемника FrSky с SBUS и SmartPort, не беспокойтесь о инверсии сигнала, аппаратная инверсия есть на всех последовательных портах. Это выгодно отличает F7 от F4 🙂
Вот официальная схема подключения CL Racing. Замечу, что в ней есть ошибка: перепутаны RX и TX. Просто следуйте тому, что написано на плате, а не в инструкции.

Проблемы с шумами у гироскопов ICM?
Как известно, у гироскопов серии ICM есть проблемы с шумами и поэтому все советуют брать гиры MPU6000. Так почему тут стоит именно ICM?
Ок, раньше с шумом были проблемы из-за схемотехнических ошибок — шумное питание.
CL Racing заверили меня, что они устранили эту проблему. После тестирования я еще напишу по этому поводу.

Флэшпамять пока не используется
128 мегабайт памяти в данный момент (BF 3.5.2) не используется. Мне сказали, что поддержка появится начиная с версии 4.
Если вы не хотите ждать, тогда скачайте форк Betaflight с поддержкой этой памяти.
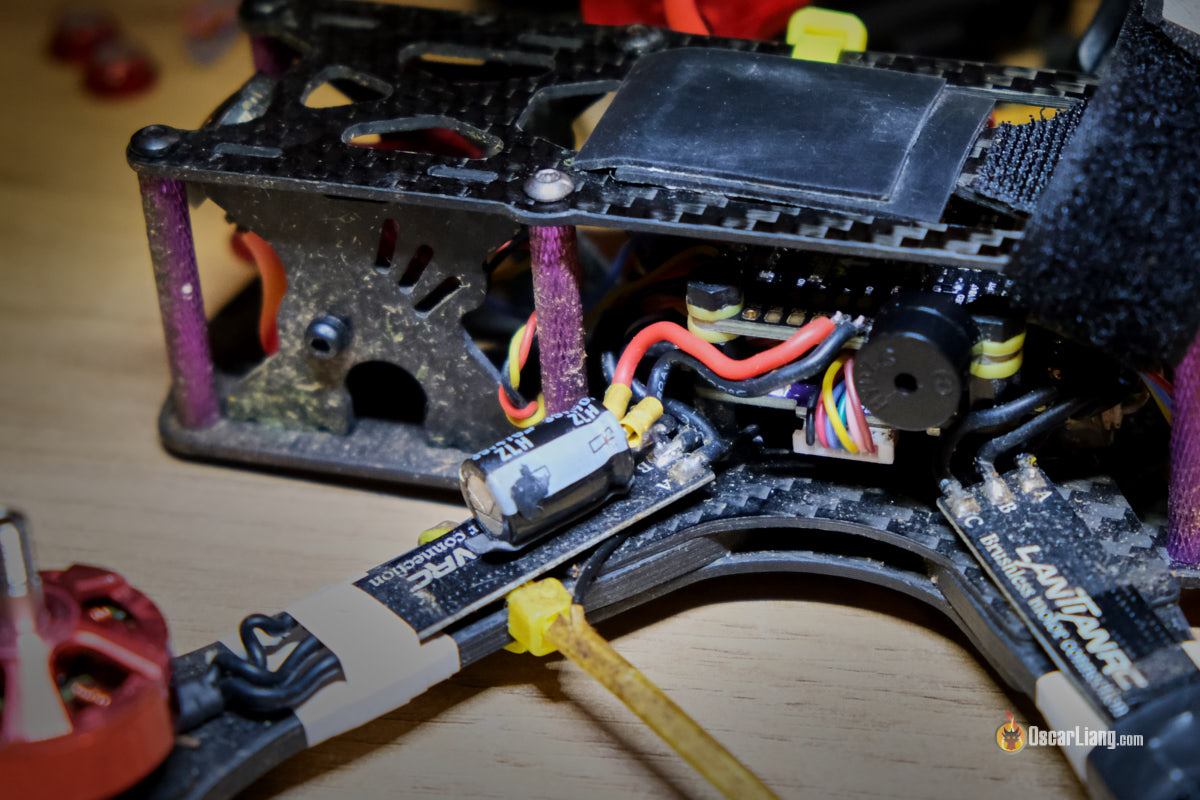
Проблемы с питанием в режиме Pitmode
К сожалению, с режимом FC Pitmode были проблемы. Мои курсовая камера и видеопередатчик питаются от линии 5 вольт полетного контроллера, и, похоже, что они её просаживают. Каждый раз, когда я щелкал тумблером, чтобы включить видеопередатчик это вызывало перезагрузку полетника, так что в итоге видеопередатчик не включался.
После разбора этой ситуации с CL Racing, они предположили, что при включении видеопередатчика происходит скачок напряжения.
В качестве «решения» проблемы я припаял конденсатор на 470 мкФ на линию питания 5 В и всё заработало! В CL Racing подумывают над тем, чтобы проапгрейдить BEC с 1,5 А до 3 А.
Возможно, это проблема проявляется только с моим видеопередатчиком (OBVTX). Если у вас другая модель или если вы будете питать его напрямую от LiPo аккумулятора, то эта проблема скорее всего и не возникнет.