В этом посте я расскажу как я использую Blackbox для настройки ПИД коэффициентов. Несколько основных и простых шагов.
Настройки ПИД – это важная часть любых мультикоптеров и полетов по FPV. Раньше настройка ПИД была игрой в угадывание методом проб и ошибок. Вы настраивали значения ПИД путем выявления любых колебаний как при визуальном полете, так и через FPV.
На мой взгляд добавление Blackbox (черный ящик) в cleanflight сделало процесс настройки ПИДов более научным. Теперь вы можете видеть что является причиной вибраций, и какие значения ПИД регулятора должны быть изменены.
Оригинал: PID TUNING WITH BLACKBOX LOGS – THE BASICS
Новичок в этом?
Тут детальная инструкция как настроить Blackbox на вашем коптере.
Если вы не знакомы с ПИД и с основами процесса настройки, прочитайте статью ПИД для мультикоптеров.
Дисклеймер: Я не эксперт, я только делюсь тем что знаю сам. Если у вас есть другие идеи или инструкции, пожалуйста оставьте комментарий. Все ради обмена знаниями.
Про настройку ПИДов есть очень много информации помимо той, что я попробую описать здесь, но я надеюсь, это позволит вам с чего-то начать.
Что сохранять в логах Blackbox
Мой тестовый полет одноминутный и очень простой. Конечно вы можете записать свой обычный полет для анализа:
- Включите Rate mode http://blog.oscarliang.net/rate-acro-horizon-flight-mode-level/ (acro mode)
- Зависните, затем летите вперед несколько секунд
- Наклонитесь (roll) влево, затем вправо, несколько раз (около 45 градусов)
- Сделайте несколько 360 градусных ролов (переворотов, roll)
- Наклонитесь вперед и назад несколько раз (опять около 45 градусов)
- Сделайте несколько 360 градусных флипов
- Повернитесь влево-вправо вокруг вертикальной оси (yaw), 45 градусов достаточно
- Сделайте несколько полных 360 градусных разворотов
Анализ данных Blackbox
Основная проверка
До начала проверки ПИД я обычно проверяю мощность на моторах. Нужно убедиться что квадрик летает нормально, иначе данные логов будут неверными.
Я смотрю на данные с теста в висении, мощность на моторах должна быть примерно на одном уровне. Если нет, то обычно есть проблемы:
- центр тяжести не в середине рамы,
- повреждены винты или моторы
Если, например, задние моторы потребляют больше, чем передние два мотора, значит зад вашего коптера тяжеловат, возможно потому что аккумулятор слишком сильно смещен назад.
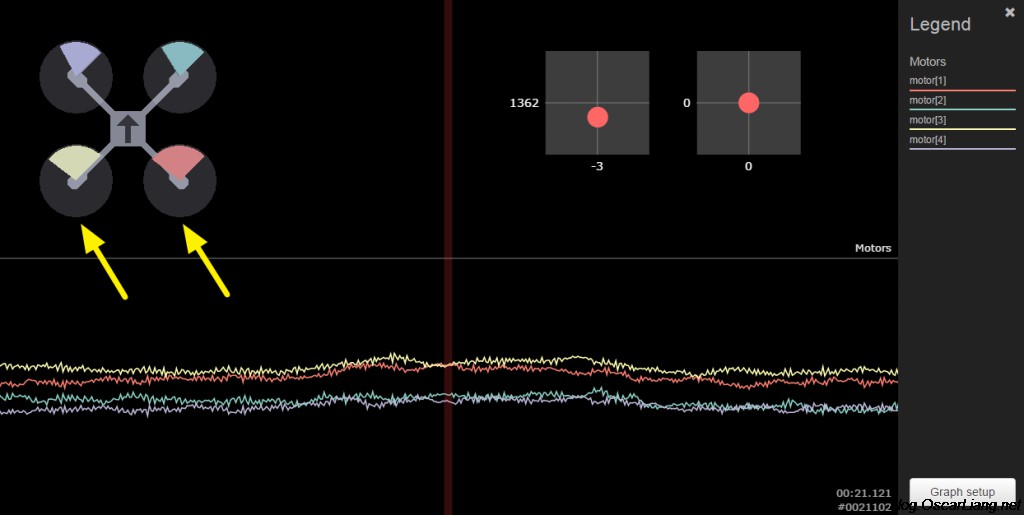
Задние моторы больше нагружены чем передние.
Если только один из моторов нагружен больше чем другие – это говорит о потенциально плохом винте, моторе или даже регуляторе.
Если все 4 мотора вращаются с примерно одинаковой скоростью во время висения, то ваш коптер нормально работает (моторы, регуляторы, винты в порядке), и имеет нормальную центровку. Не обязательно абсолютно одинаково, но достаточно близко будет достаточно.
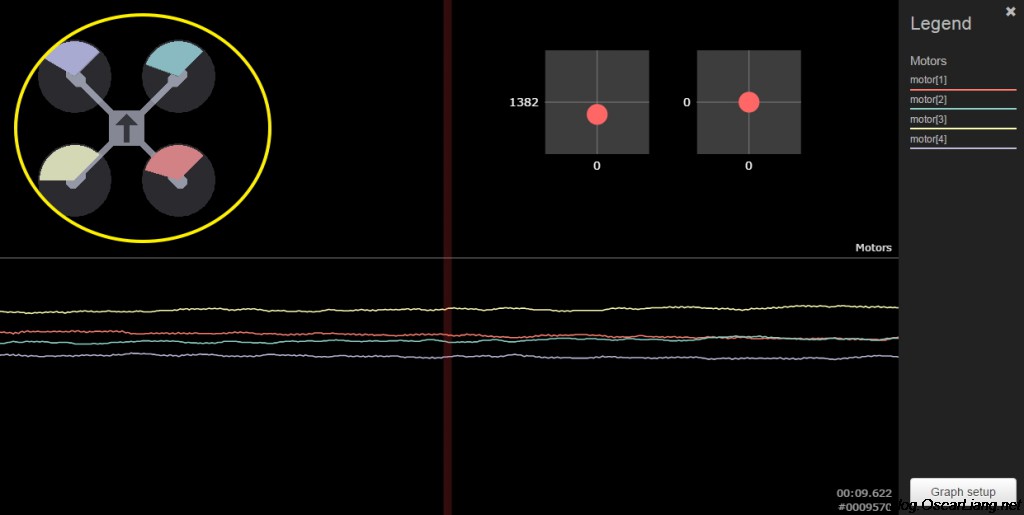
Моторы нагружены примерно одинаково, меня это устраивает.
Диагностика ПИД
С хорошо подобранными значениями ПИД мы получим:
- Плавные графики с гироскопов; значения будут с малым уровнем шумов и без периодических колебаний.
- Плавная регулировка оборотов двигателей – они будут работать тише и меньше будут греться. Двигатели и регуляторы греются если графики содержат множество колебаний или если они выглядят как Пакмэн
- На графиках видно реакцию на действия с пульта и нет колебаний.
Обычно я использую 2 графика:
- График 1. rcCommand, gyro
- График 2. PID_P, PID_I, PID_D, PID_sum
Я прохожусь по этим графикам для крена (Roll), тангажа (Pitch) и рысканья (Yaw) по отдельности.
График 1 показывает где вы двигаете стики и как коптер реагирует на ваши действия (угловое ускорение). Также он показывает, как ваш ПИД регулятор (следующий график) действует на гироскоп.
Следующий график – ПИД, он более важен. Так, по моему мнению, нормальные графики ПИДов должны выглядеть, и так они реагируют на увеличение/уменьшение значений.
- P – в идеале P не должен вызывать много шума на гироскопе. Он может иметь некую волну, что нормально, но в разумных пределах. Если P слишком велик, вы увидите увеличение шума, и на графике ускорения волна также увеличиться (низкочастотные колебания)
- D – в идеале D должен повторять P, но на шаг впереди P. Он должен иметь похожее значение. Однако D обычно более шумное чем P, так что хорошо, когда его значение немного меньше чем P, иначе нужно уменьшить значение «Dterm_cut_hz» (см http://blog.oscarliang.net/betaflight-firmware-setup/
- I – скажем просто, я обычно просто игнорирую I и настраиваю его в поле. Как правило ставлю значение I настолько низким, насколько возможно, при этом коптер не должен дрейфовать и трястись при снижении. Некоторые советуют резко дать газу и посмотреть удерживает ли коптер угол, если не увеличивать I. Но я выяснил, что меньшее значение I лучше для более агрессивных полетов, квадрик более маневренный.
Примеры настройки
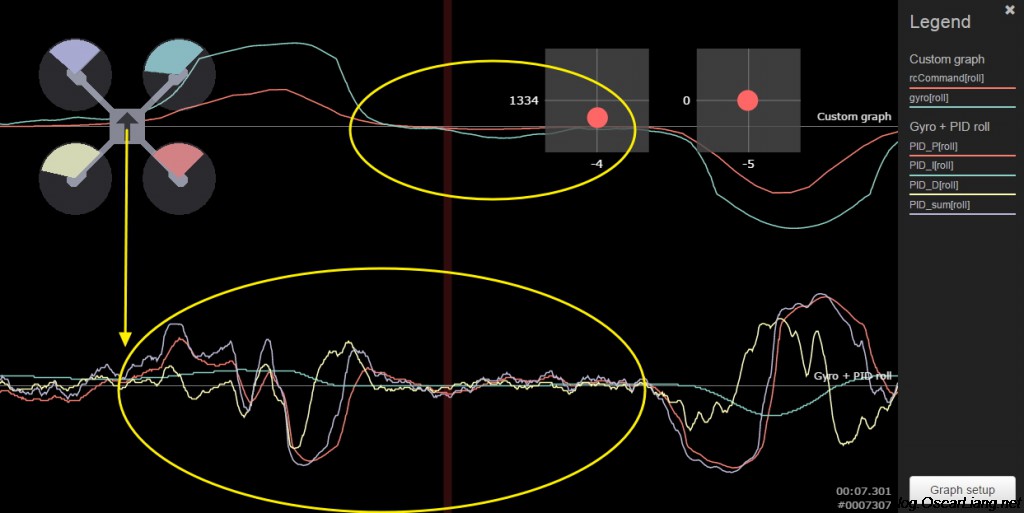
Крен/тангаж (Roll\Pitch), значение P
Очевидно, что значение P в этом примере слишком большое.
Как только я двинул стик по крену, P начал колебаться, и эти волны видны на графике (желтый круг)
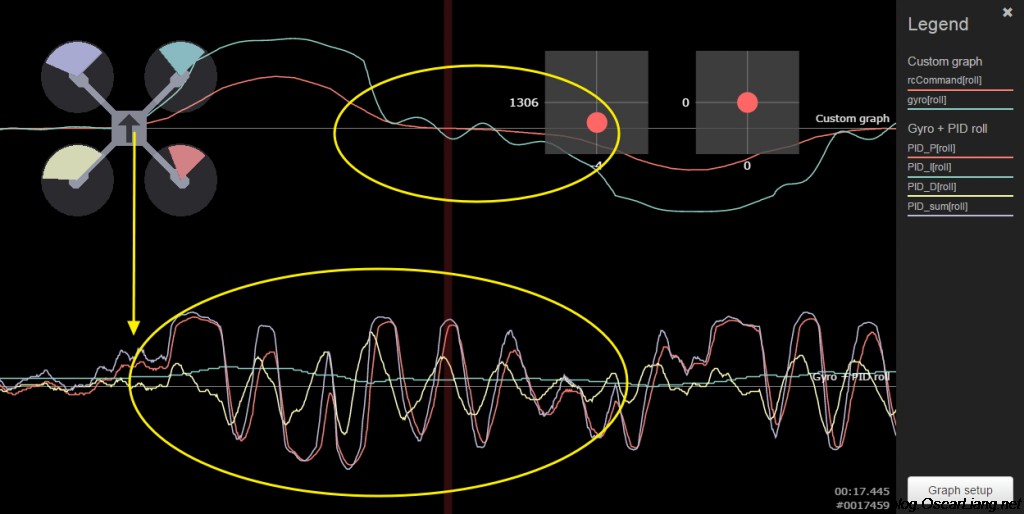
Я должен уменьшить P.
Намного лучше, больше нет постоянных колебаний P и гироскопа.
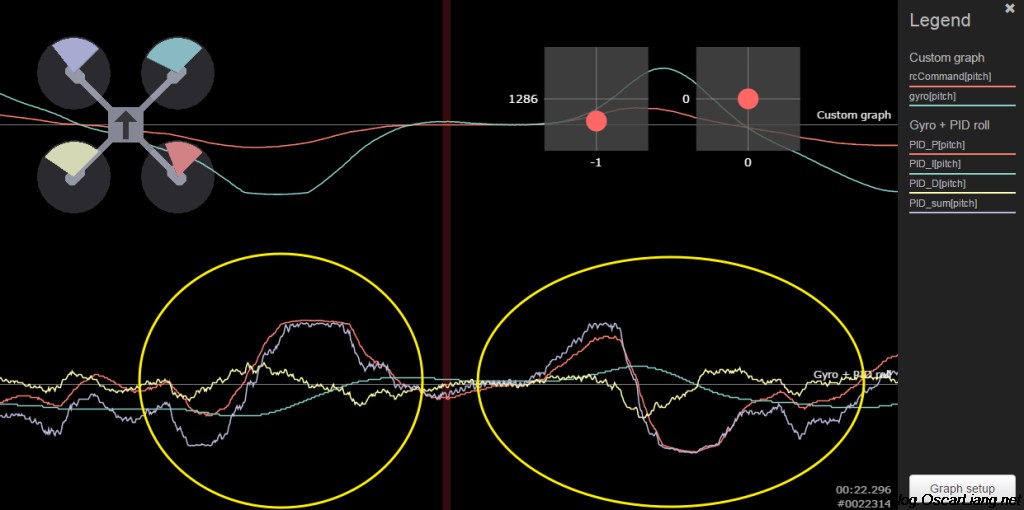
Крен/тангаж (Roll/Pitch), значение D
Я предпочитаю настраивать в 2 этапа. Кроме анализа графиков, вы должны также проверить запись с камеры, если есть отскоки в конце флипов и ролов. Если вас это устраивает, то нет необходимости увеличивать D.
Пример низкого значения D
Представьте квадрик делающий отскок после резкого флипа или рола.
Здесь я увеличил D. Теперь значение D близко к значению P. В вашем случае может увеличиться уровень шума, но я везунчик и у меня не все так плохо. Некоторые коптеры шумнее других по разным причинам, как электрическим, так и механическим.
Теперь я иду на улицу и снова летаю, если я замечу отскоки, то увеличу D еще немного, если отскоков не будет – значит все хорошо.
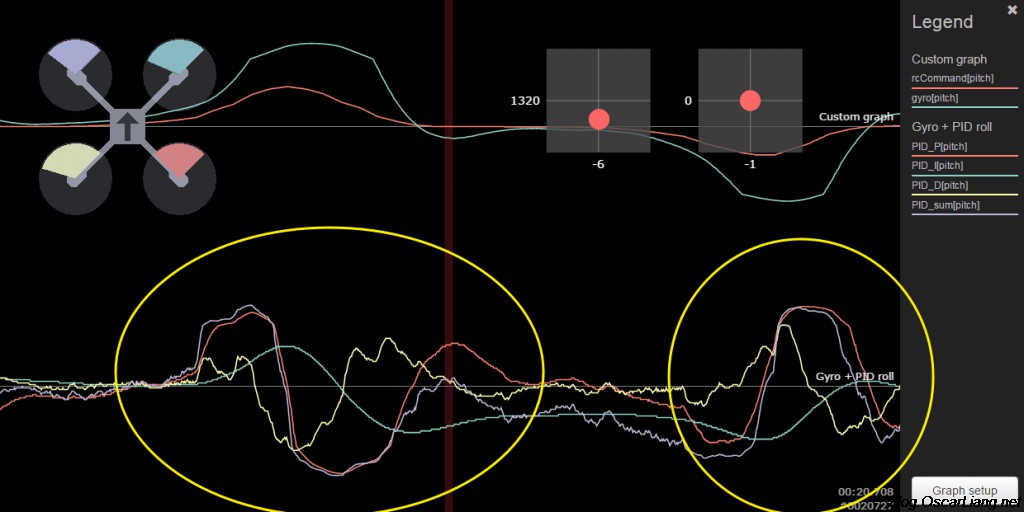
Еще один хороший пример график крена/тангажа P, после настройки (увеличил D) во втором тесте.
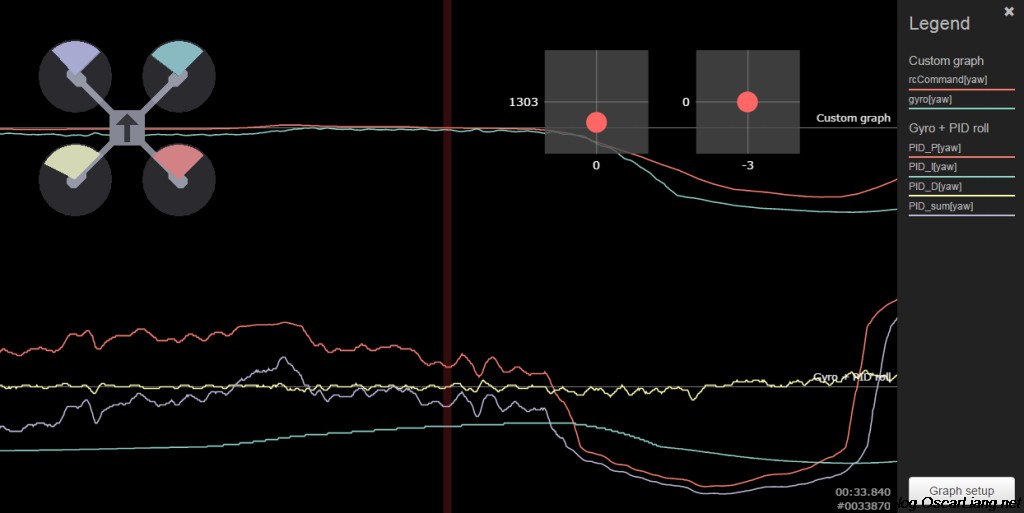
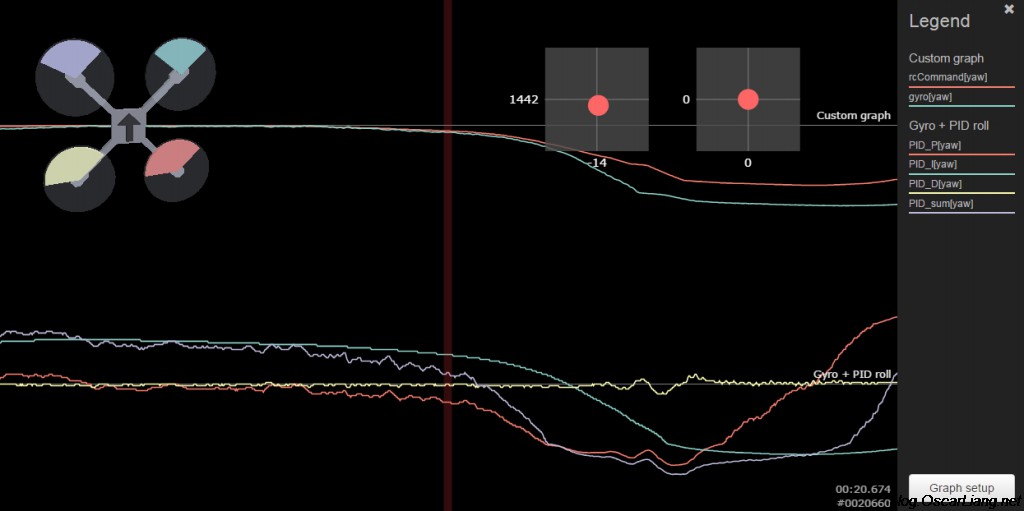
Рысканьше (Yaw) значение P и D?
Практически также как для тангажа и для крена, увеличение P по рысканью даст вам лучший отклик на стики, но может вызывать промахи. Если у вас есть дрейф по рысканью, тогда увеличьте I, но старайтесь держать I как можно меньшим. Так же как и D, значение обычно небольшое, где-то 5-10.
P по рысканью показывает некоторые колебания на графике, но это нормально, и не должно сильно влиять на полет. Колебания по рысканью появляются потому что коптер не имеет эффективного управления по этой оси.
Так же я заметил, что, при прочих равных условиях, меньшая рама, меньший шаг винта или более высокий kv двигателя дадут более плавный график по yaw. Это значит что колебания связаны с эффективностью управления по рысканью.
График для моего EVO250 с двигателем 1960KV и винтами 6045.
А это мой Ghost220, двигатели 2300KV, винты 5045
Оба квадрика летают отлично. Колебания по рысканью это не конец света. Шум уменьшился на моем 250м квадрике, когда я уменьшил P для рысканья, но управление стало немного менее отзывчивым и плавным, я так не люблю.
Нужна помощь с настройкой?
Присоединяйся к нашей группе http://multicopterfpv.com/ и загружай логи если хочешь.
Пhttps://blog.rcdetails.info/vybiraem-poletnye-kontroller-dlya-kvadrokoptera/
> Флэш память для черного ящика (blackbox). У некоторых ПК имеется встроенная память, у других — внешние логгеры (open logger) с microSD карточками. Если вы не планируете использовать blackbox для настройки, тогда пропустите этот пункт.
Спасибо, полезный блог, а в чем все-таки основные отличия между open logger и microSD?
Сам не использовал, но судя по характеристикам: это довольно универсальное решение, не только для Betaflight/Cleanflight, т.к. подключается через последовательный порт.
Количество последовательных портов ограничено, и для большой скорости записи они не очень подходят.