
Это история о полетном контроллере, который помер сразу после окончания сборки коптера и в которой появляется еще один ПК для спасения. Спасибо Newbeedrone! Спасибо BeeFlight!
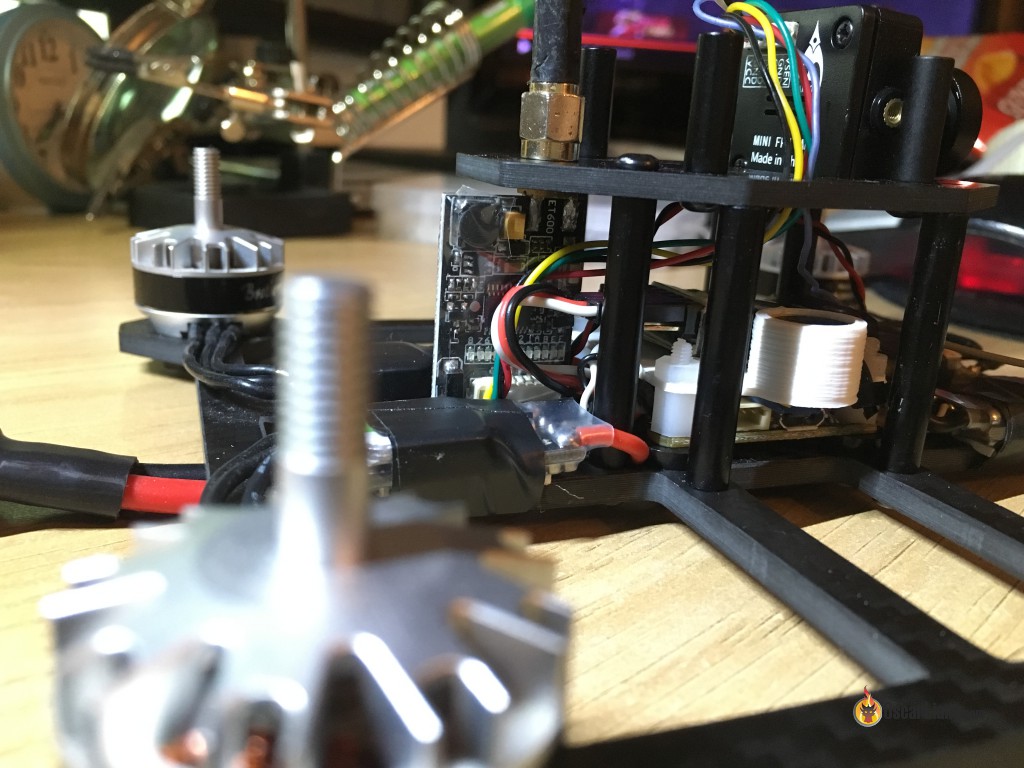
Итак, недавно я получил релизную версию Kombini FC для замены платы прототипа. С нетерпением ждал его, потому как это первый (у меня) контроллер с интегрированной PDB. Не говоря уж о новой раме Quadro200 от одного самых креативных дизайнеров рам, Стефана ван дер Энда (Stefan van der Ende). Рама — произведение искусства.



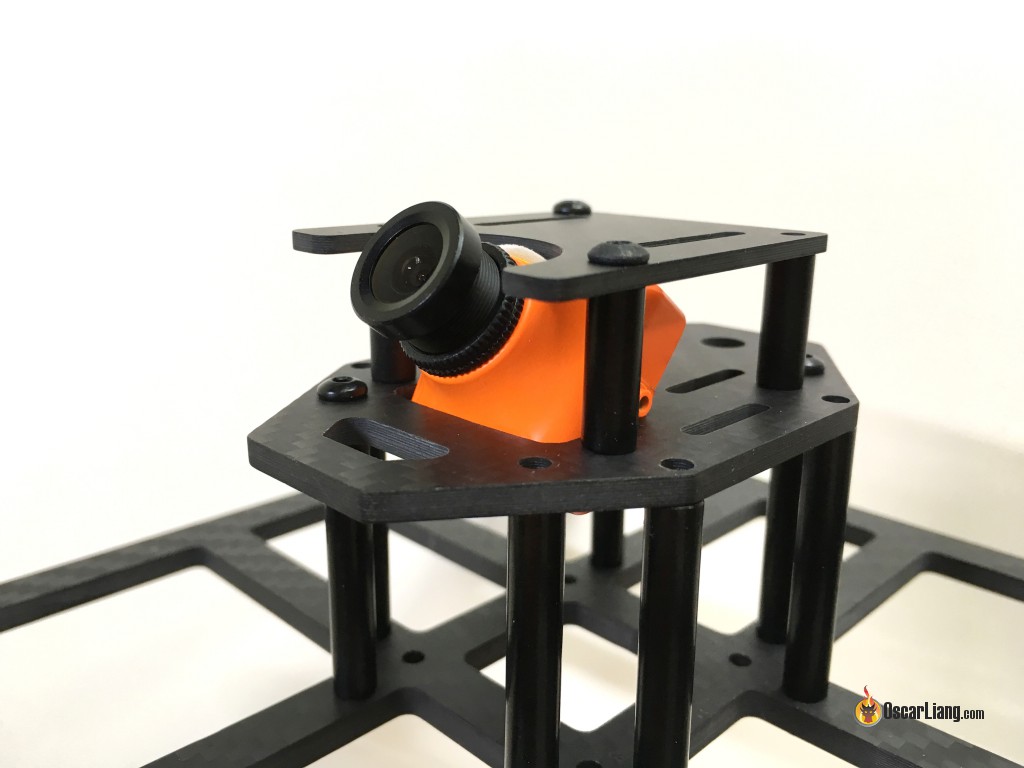
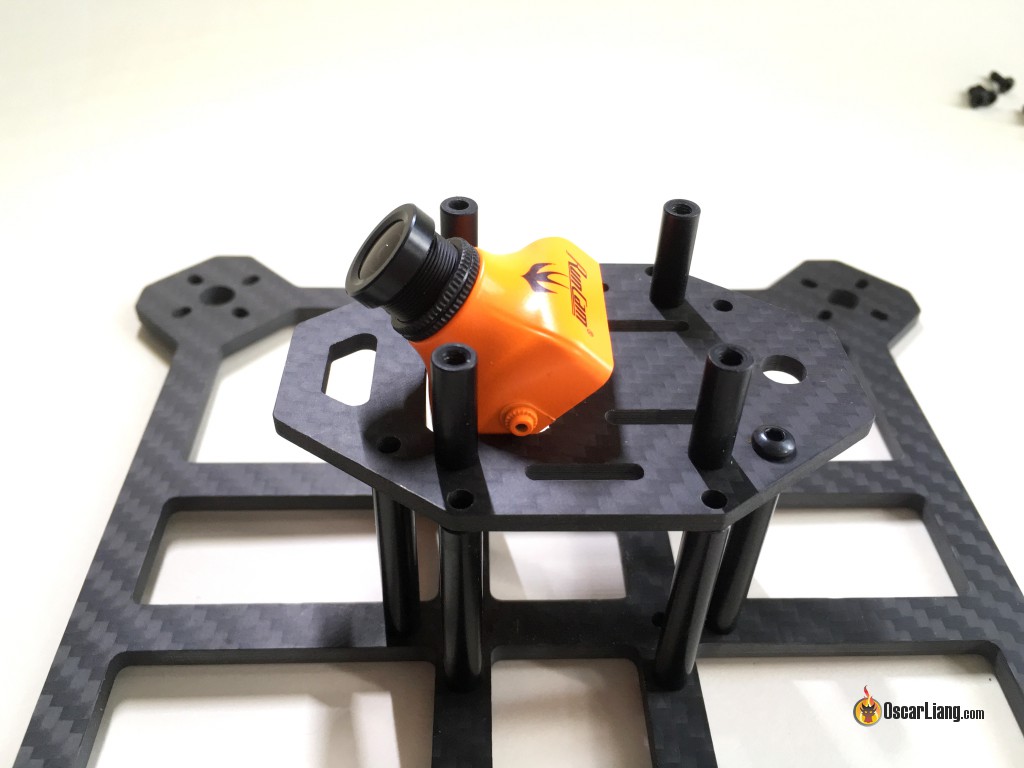
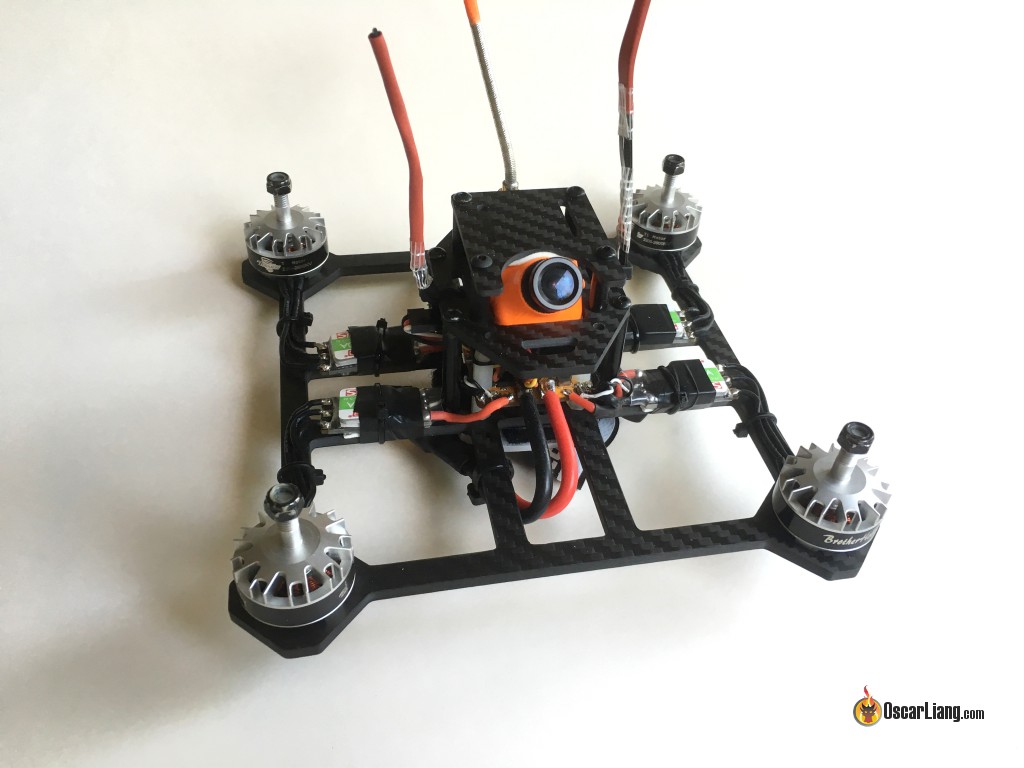
Хорошо продуманное крепление курсовой камеры: она сидит прямо в прорези, а дополнительные детали (напечатанные на 3D принтере) просто не нужны. Однако угол фиксированный, изменить его нельзя.

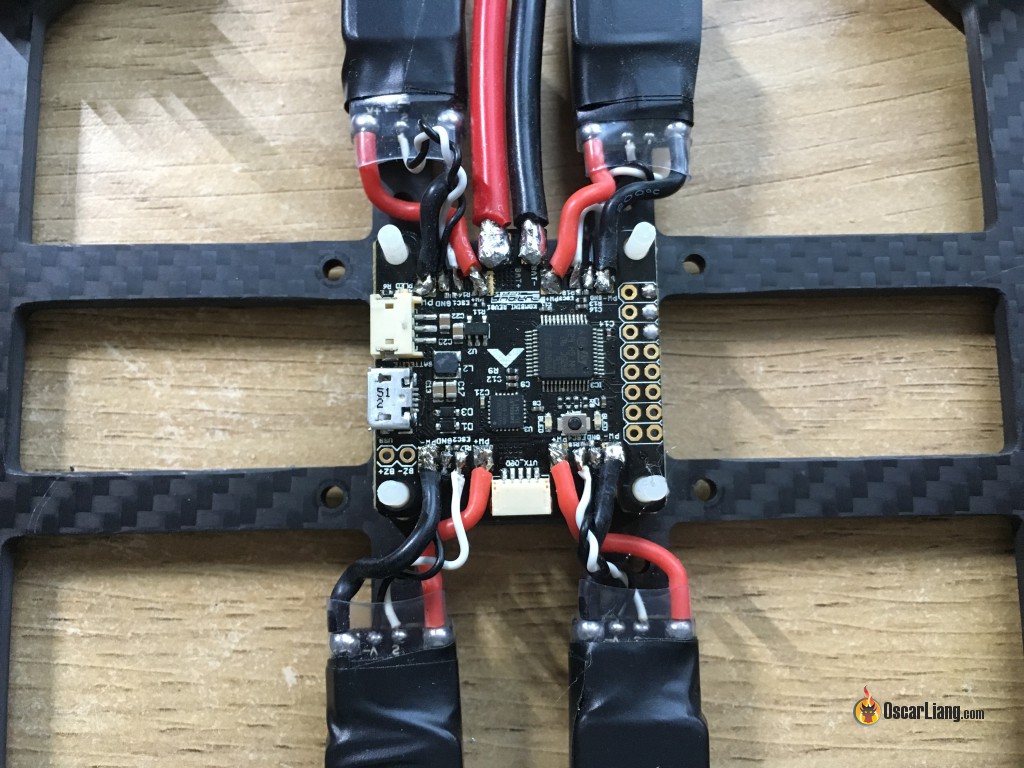
Установить ПК не просто, паять довольно неудобно, т.к. на контроллере очень много деталей и контактных площадок для пайки, приходится быть очень осторожным чтобы не закоротить контакты. Хорошо, что они оставили «землю» при подключении регуляторов.
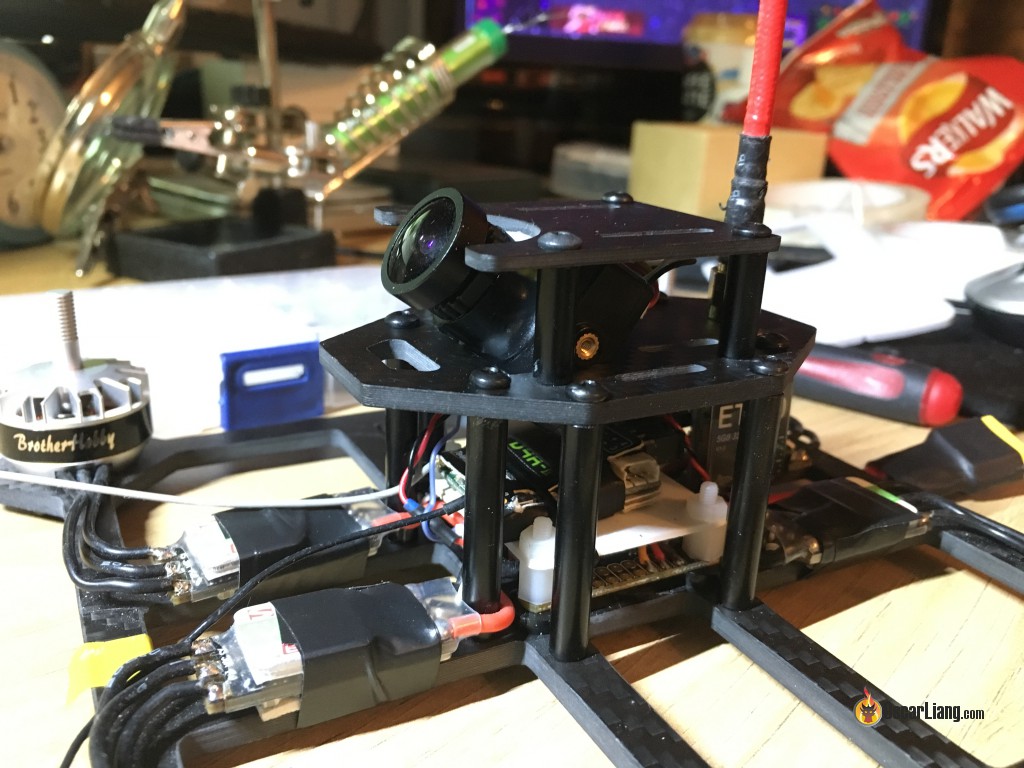
Защищаем ПК фирменной (IntoFPV) пластиной с держателем пищалки. 🙂

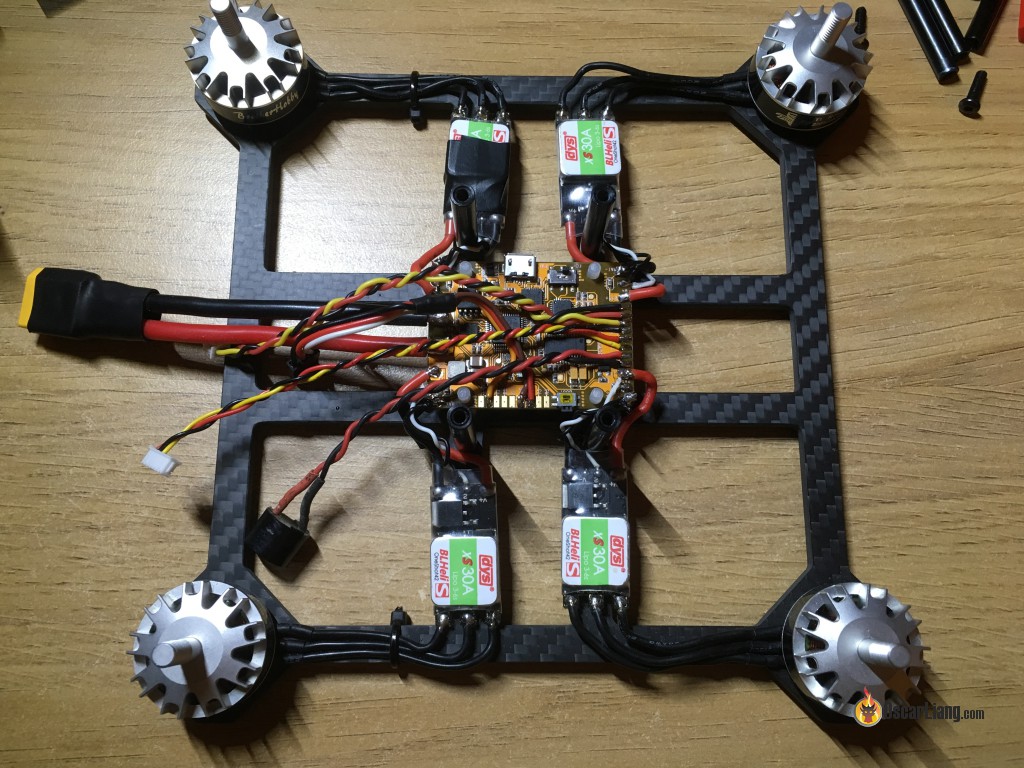
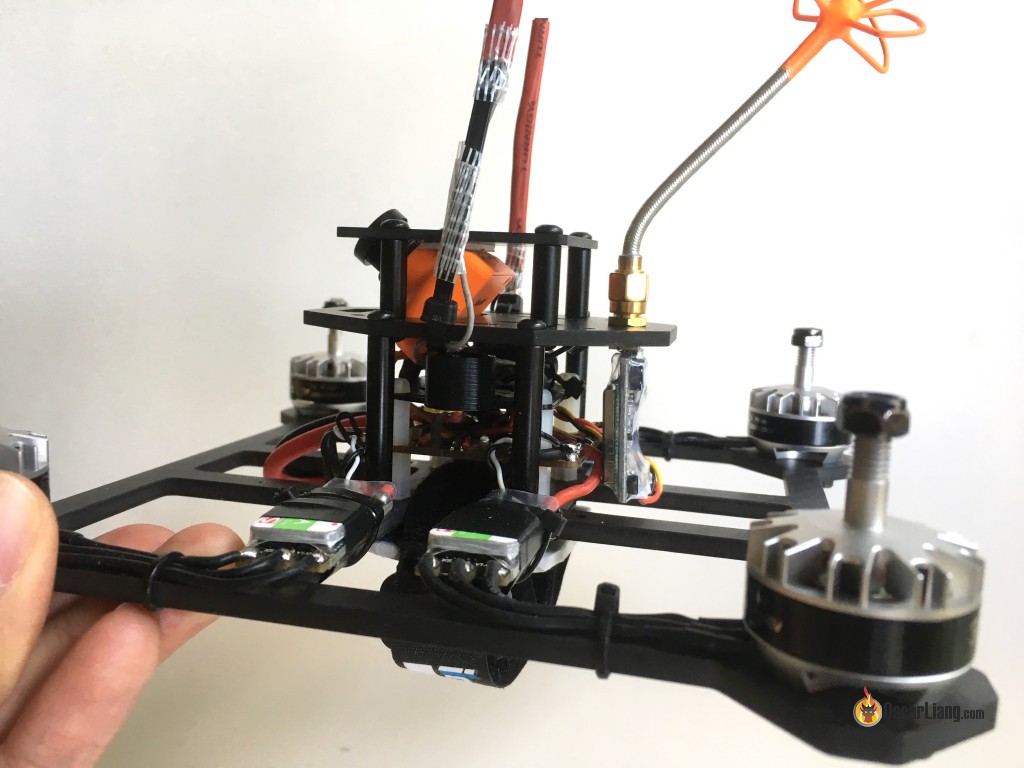
В этой сборке я использовал регуляторы оборотов DYS XS30A ESC (BLHeli_S) и моторы Tornado T1. Я думал, что это будет самая аккуратная сборка!
При использовании камеры Foxeer Arrow (у которой имеется вход VBAT и OSD для отображения напряжения), мне нужно было подключить только видео передатчик и приемник, никаких OSD и PDB!
Подключил ПК к компьютеру, настроил все, откалибровал ESC. Почти все готово к полетам.
Но! (все что было написано до слова «но» — не считается)
Когда я отключил USB кабель и подключил Lipo аккум, ничего не произошло, на ПК не подавалось питание.
Попробовал разобраться что произошло, что пошло не так. Отсоединились кабели? Плохая пайка? Короткое замыкание?
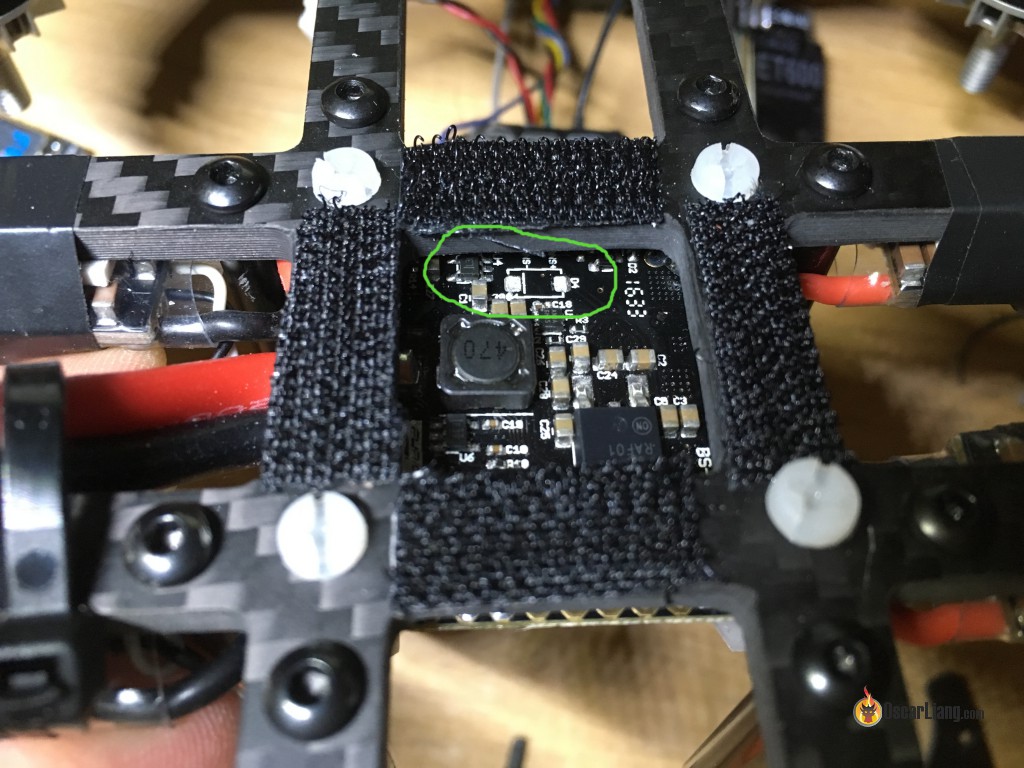
Когда я перевернул квадрик, заметил отсутствующий диод (D4, обведен зеленым). Думаю, он отвалился в процессе сборки квадрика.
Я был очень разочарован, потратил 4 часа на сборку и теперь мне нужно полностью разбирать квадрик, и попробовать пофиксить проблему (не помогло).
К счастью, неделей позже я получил другой ПК и завершил сборку квадрика.
Встречаем, полетный контроллер BeeFlight
BeeFlight производит NewBeeDrone. Полученная плата — прототип и ее еще нельзя купить у них в магазине.
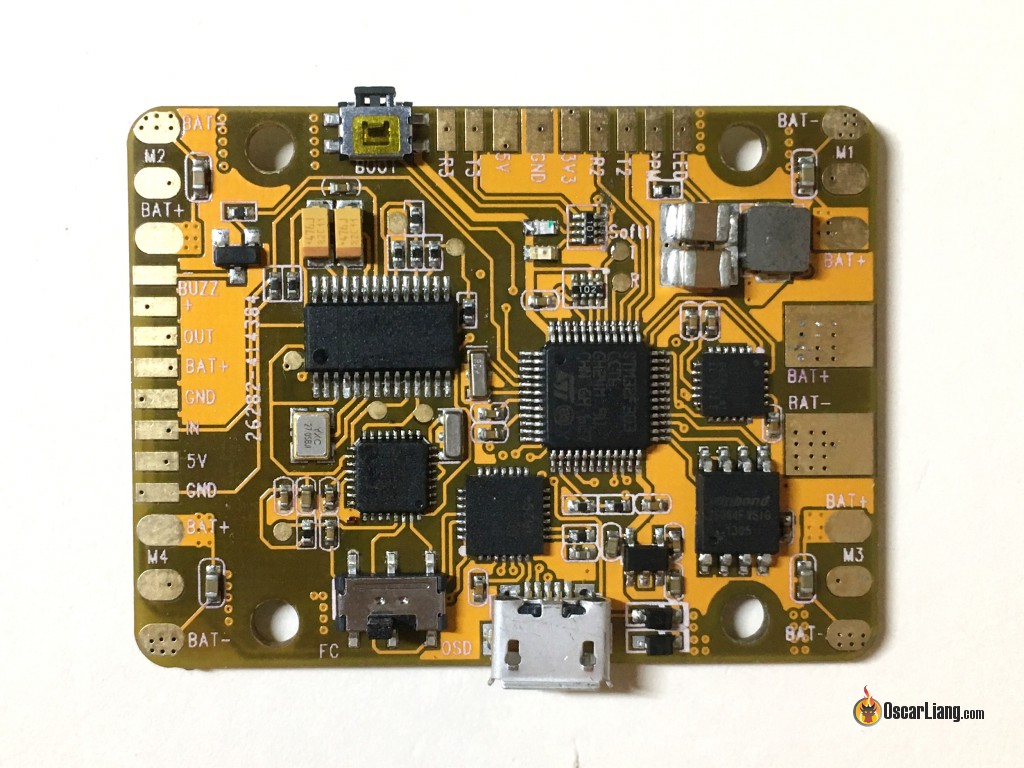
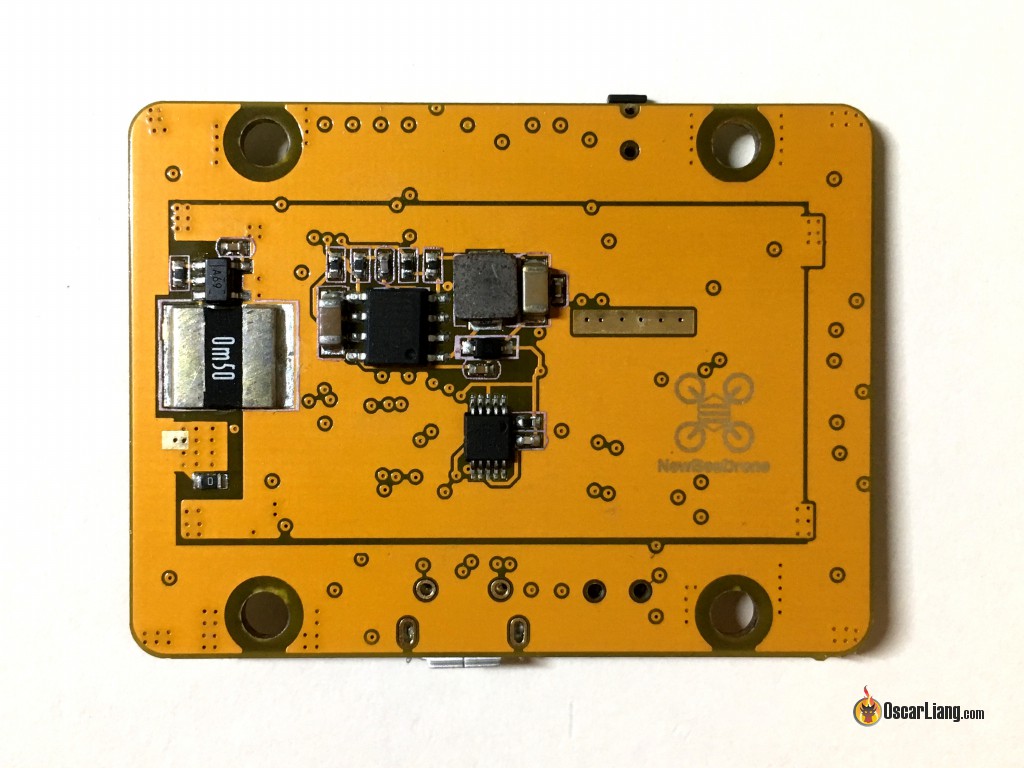
Это очень интересная плата. Она прямоугольная, а не квадратная, размер 36 на 50 мм.
Даже когда я получил плату у меня не было никаких ее характеристик. Возможно они еще поменяются перед выпуском финальной версии. Я не знаю, подтверждения от NewBeeDrone не получал.
Итак, я знаю, что:
- плата на F3, прошивку выбирать (target) для SPRacing F3
- PDB встроенная, как у Kombini, нужно подключить регули к плате и питание
- встроенная OSD, с прошивкой MWOSD (OSD можно перепрошить используя тот же USB порт, есть переключатель для выбора подключения OSD или ПК)
- встроенный датчик тока
- имеется BEC на 5В (на 12 В — нет), однако есть фильтр по питанию для подключения видео передатчика
- есть поддержка SBUS, Spektrum, PPM, нет поддержки PWM
Что еще я заметил в процессе сборки:
- на выходе 5 В напряжение 5.26 В, это может быть проблемой для светодиодов WS2812, для прочей электроники проблем нет
- хотелось бы стабилизированное напряжение 12 В, на плате есть свободное место
- плата довольно большая, поместится не во все рамы
- нет «земли» для подключения к регуляторам оборотов
- при первом включении не было OSD, пришлось поменять PAL/NTSC
- частоты гироскопов и looptime 4k/4k. При использовании частоты гироскопов 8К, CPU используется на 100%. Также думаю не получится использовать Oneshot42 и Multishot. Пришлось использовать 4K/2K и Oneshot125
- от USB питается пищалка и приемник
- предустановлены прошивки Betaflight V3.0 иMWOSD 1.6
Схема подключения:
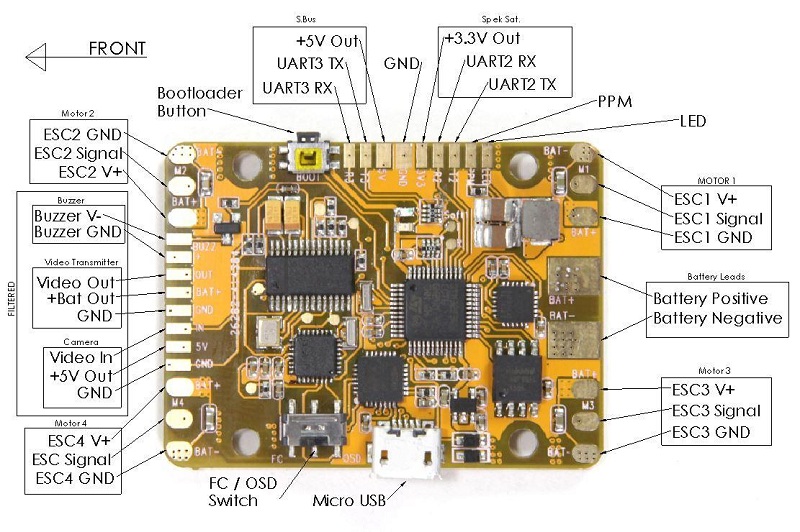
Припаиваем провода, все остальное очень просто. 🙂 Огромный плюс рам все-в-одном.
Из-за того, что имеется встроенная OSD, я решил использовать камеру Runcam Swift.
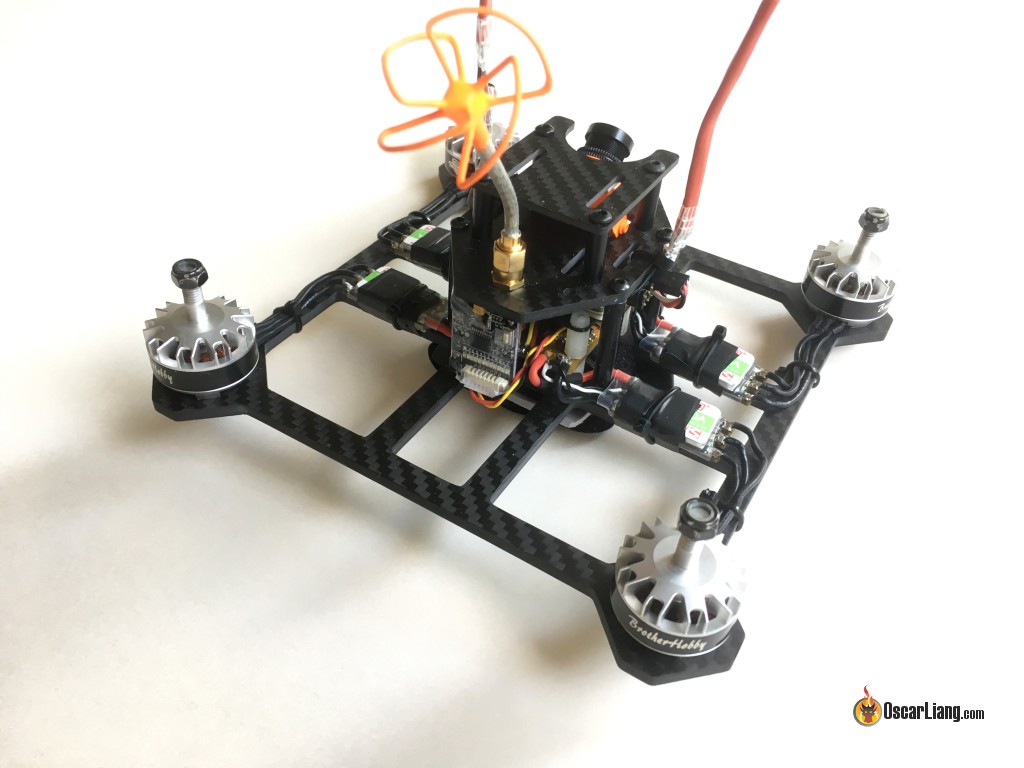
Вес 335 грамм (не считая аккумулятора и HD камеры).
Вы, наверное, заметили, что я развернул раму на 180 градусов. Это сделано из-за того, что при обычной компоновке кабель с XT60 будет мешаться видео передатчику.
Это создает небольшую проблему — расположение регуляторов. Я уже обрезал провода по минимуму, так что мне пришлось изменить порядок выходов на моторы используя motor mixer (англ.).
Изначально было:
mmix 0 1.0, -1.0, 1.0, -1.0 mmix 1 1.0, -1.0, -1.0, 1.0 mmix 2 1.0, 1.0, 1.0, 1.0 mmix 3 1.0, 1.0, -1.0, -1.0
В консоли поменял на:
mixer custom mmix reset mmix 0 1.0, 1.0, -1.0, -1.0 mmix 1 1.0, 1.0, 1.0, 1.0 mmix 2 1.0, -1.0, -1.0, 1.0 mmix 3 1.0, -1.0, 1.0, -1.0 save
После полетов в выходные обновлю пост, посмотрим, как хорош этот ПК в плане фильтрации шумов, удобства эксплуатации и качества работы.
После первого полета
Он летает! Фильтры по питанию работают отлично, картинка чистая, шума нет, даже при том, что я использую довольно мощную конфигурацию (2600 KV c 5″ винтами).
В плане тюнинга, я все еще пытаюсь найти решение чтобы поменьше нагружать CPU, и разобраться с использованием мультишота. Хотя для меня не важно с какими настройками летать: с 8K/4K Multishot или с 4K/2K Oneshot125. 🙂