
Рама Dronehaus Mach5 разработана и производится в США. Предназначена для гоночных коптеров, вес максимально снижен при этом она достаточно крашеустойчива.
Купить раму Mach5 можно на сайте Dronehaus.
Обзор рамы
Рама Х-образная, лучи и нижняя пластина — единое целое, размер 200 мм. Толщина нижней пластины 3.5 мм. Стоек всего 4 штуки, сделано это для снижения веса. Стойки высотой примерно 30 мм.
Вес рамы около 90 грамм.
На лучах имеются дополнительные карбоновые пластины для увеличения прочности.

Курсовая камера крепится на деталь отпечатанную на 3D принтере, которая соединяется в верхней пластиной. Вмещаются камеры типа HS1177 и Runcam Swift.




Сборка
Комплектующие:
- Полетный контроллер Radiance
- Регули Aikon SEFM 20A
- Моторы Cobra 2204 2300KV
- DemonRC Core PDB
- X4R-SB
- Hawkeye VTX
- Foxeer Arrow HS1190 V2
- DAL 5040×3
Припаиваем моторы к регуляторам.

У ПК Radiance имеется встроенный BEC, так что его можно запитать напрямую от Lipo аккумулятора. По сути это Kombini без PDB, поэтому нужно использовать внешнюю PDB, в моем случае это Demon Core PDB.

У меня Arrow V2, так что внешнее OSD не нужно; у этой камеры есть вход для измерения напряжения аккумулятора, которое она отображает на экране. Сама же она питается от 5В идущих с видео передатчика, а сам видео передатчик от 12В c PDB. Картинка четкая, без шума.
Приемник X4R-SB, у него отпаяны разъемы. Хотя это и не обязательно.
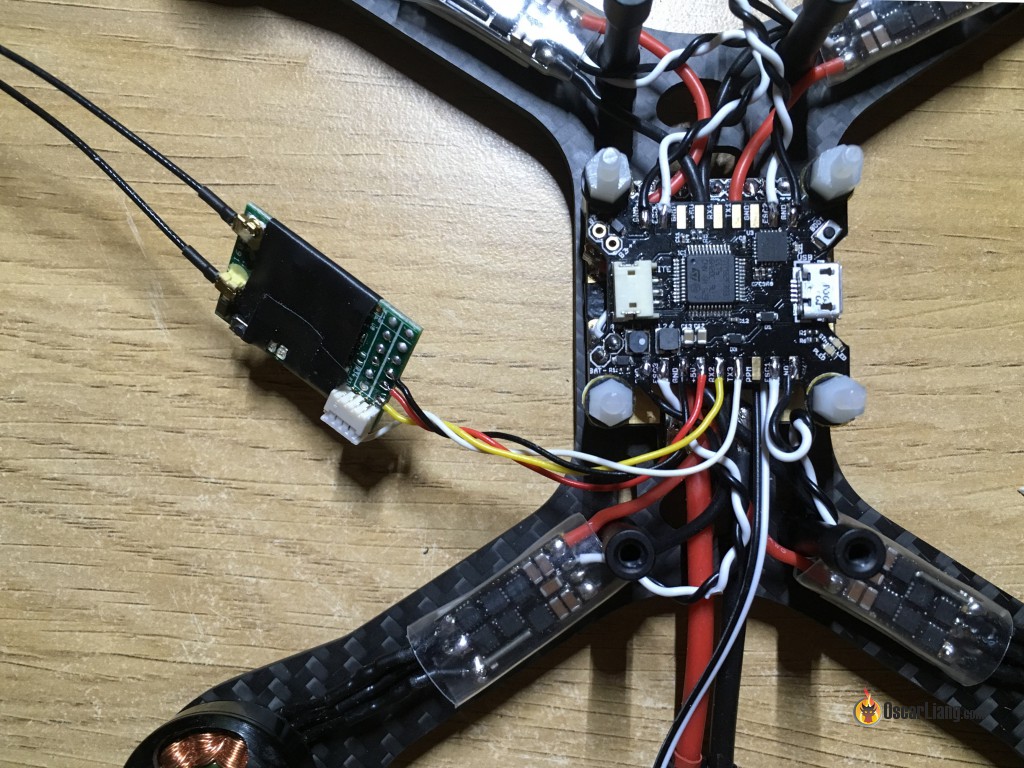
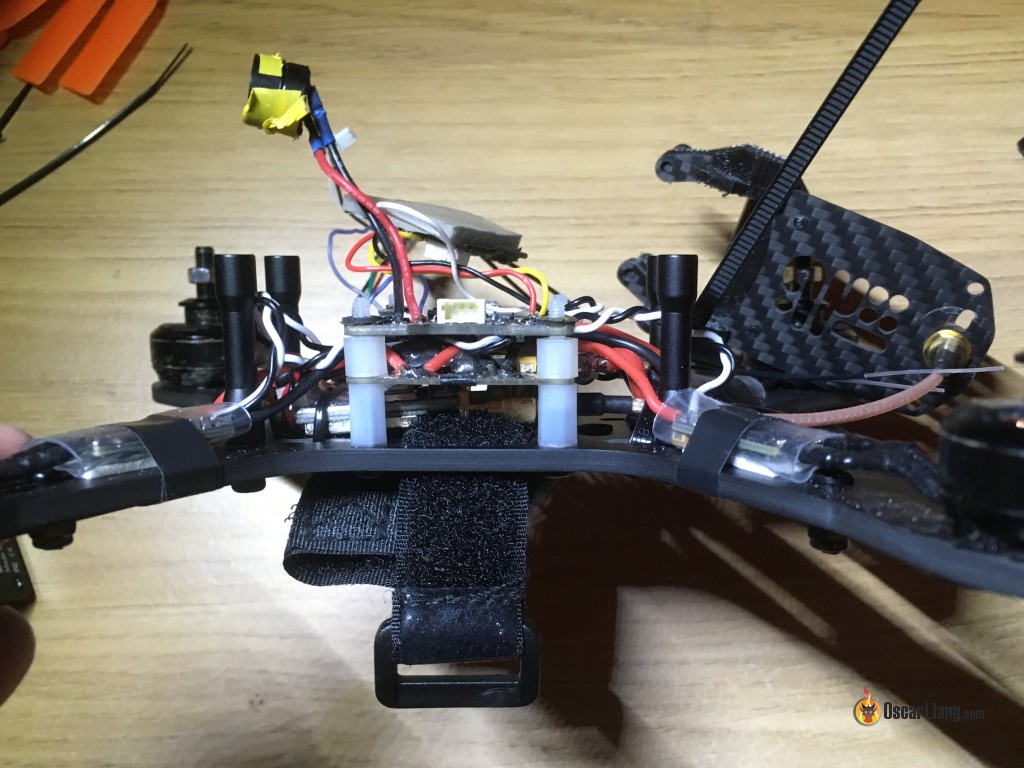
Установка комплектующих в эту раму дело не простое из-за того, что места маловато. Изначально я хотел установить приемник и видео передатчик над полетным контроллером, но это невозможно. Мне пришлось все убрать и установить видео передатчик в самом низу (ниже PDB), а приёмник над ПК.
Мне советовали установить и приемник и видео передатчик под PDB, но они туда не влезли.





Настройка и полеты
Этот квадрик летает невероятно, думаю это один из лучших квадриков на которых я летал. Вес собранного 284 грамма (без аккумулятора и HD камеры).
После примерно 2х месячного перерыва в полетах, это первый полет с Betaflight 3.0 (не самый последний релиз) и с Multishot. Офигенная конфигурация, квадрик очень устойчивый и отзывчивый, даже при использовании старых и медленных моторов Cobra.
Я собирался использовать последнюю версию BF и BLHeli_S, но тестовая версия Radiance имеет кое-какие проблемы с железом, поэтому я не смог перепрошить ПК и регуляторы через него. Проблема с железом будет исправлена в релизной версии полетного контроллера.
В настоящий момент я могу использовать 4K/8K (PID/Gyro) и Multishot, если я увеличиваю частоты до 8К/8К, использование процессора достигает 50%. Судя по всему, для нормального полета мы должны держать загрузку порядка 30-35% в состоянии покоя.