Замечали, что при включении питания коптер издает писк? Коптер издает звук, даже если в нем нет пищалки. Попробуем использовать эти звуки для поиска упавшей модели.
Архив метки: продвинутым
Полетный контроллер — кирпич. Как спасти?

По ошибке можно превратить полетный контроллер в «кирпич» (это состояние, когда ПК невозможно подключить к компьютеру, появляется сообщение об ошибке типа timeout или ошибки соединения). Возможно в таком состоянии получится даже летать на коптере, но не получится подключить плату к Cleanflight или Betaflight конфигуратору.
Как коэффициент усиления антенны влияет на радиус приема FPV
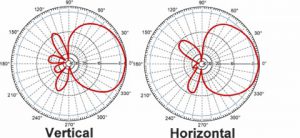
Коэффициент усиления антенны и диаграмма направленности излучения связаны между собой и, по сути, показывают максимально достижимый радиус уверенного приема. В этой статье мы рассмотрим, как именно коэффициент усиления влияет на расстояние уверенного приема сигнала, разберем все достоинства и недостатки антенн с большим коэффициентом усиления.
Софтмаунт — мягкое, антивибрационное крепление моторов и полетного контроллера

С увеличением мощности моторов, полетный контроллер испытывает все больше и больше высокочастотных вибраций и шума, что приводит к колебаниям всего коптера. Софтмаунт — это способ изолировать датчики полетного контроллера от вибраций других частей коптера.
Прошивка и программирование BLHeli через Cleanflight

Вы знаете, что теперь можно менять настройки регуляторов в BLHeliSuite, через ПК (полетный контроллер)? Не нужно сложных утилит, USB программаторов или Ардуино. Все что вам нужно это подключить ПК.
Эта фишка превращает ваш ПК в устройство программирования регуляторов.
Основы настройки ПИД контроллера с помощью логов Blackbox

В этом посте я расскажу как я использую Blackbox для настройки ПИД коэффициентов. Несколько основных и простых шагов.
Настройки ПИД – это важная часть любых мультикоптеров и полетов по FPV. Раньше настройка ПИД была игрой в угадывание методом проб и ошибок. Вы настраивали значения ПИД путем выявления любых колебаний как при визуальном полете, так и через FPV.
На мой взгляд добавление Blackbox (черный ящик) в cleanflight сделало процесс настройки ПИДов более научным. Теперь вы можете видеть что является причиной вибраций, и какие значения ПИД регулятора должны быть изменены.