
Прямо какая-то истерия с этими микрокоптерами, сообщество продолжает ставить новые рекорды в дисциплине «самый маленький микрокоптер». Зима близко, нам нужен микрокоптер для полетов в помещении, думаю пришло время построить один такой для себя!
Оригинал: Angry Oskie – The Smallest Brushless Micro Quad Build
«Бесколлекторный» микрокоптер???
Я летал на разных микрокоптерах с коллекторными моторами, а на эту мелкую бестию собираюсь поставить бесколлекторные моторы. Основная причина — это недостаток мощности и недолговечность коллекторных моторов — они насколько недолговечные что ломаются каждые 100 полетов.
Однако, сборка на бесколлекторных может быть немного более сложной, т.к. потребуются отдельные регуляторы скорости для моторов. Остальная же часть сборки должна быть похожей на обычные коллекторные микрокоптеры.
О, они также летают на 1S LiPo аккумуляторах, так что я смогу использовать аккумуляторы от предыдущих микрокоптеров 🙂
Самый маленький коптер, который я когда-либо собирал!
Я не знаю это самый маленький коптер в мире или нет, но он точно самый мелкий из тех что я собирал.
Планирую использовать моторы 15000kv, с двух- и трехлопастными пропами диаметром 31 и 40 мм. Это позволит мне уменьшить размер рамы до 48 и 59 мм соответственно, потрясающе мелкий коптер!
На сколько он маленький? Сравним с tinyWhoop, который имеет размер 64 мм. Tiny Whoop — это больше не микрокоптер по сравнению с Angry Oskie!
Общий вес квадрика примерно 20-23 грамма (не считая аккумулятора).

Слева направо: Angry Oskie 59mm, 48mm и Tiny Whoop (E010)
Чтобы лучше представить размер, вот вам моторы 0703 в сравнении с обычными моторами для 5″ квадриков (2306) 🙂

Предупреждение! Этот коптер не для всех, из-за маленького размера новичкам будет сложно им управлять!
Список комплектующих для микроквадрика на бесколлекторных моторах
Буду использовать нижеследующие комплектующие. Вы можете выбрать другие детали, только убедитесь, что они подходят по размеру к моей раме.
- FPV оборудование: CM275T AIO Camera/VTX (Banggood | Amazon)
- Полетный контроллер: RacerStar F3D8 FC (Banggood | Amazon)
- Регуляторы: RacerStar Star4 4A 4-in1 ESC (Banggood | Amazon)
- Моторы: RacerStar BR0703 15000KV motors (Banggood | Amazon)
- Пропы 40mm (Banggood | Amazon)
- Пропы 31mm (Banggood | Amazon)
- Аккумуляторы: Eachine 25C 500mAh | “Blue” 25C 500mAh | NanoTech 45C 300mAh
- Разъемы «мама» для аккумуляторов – LOSI | Pico blade (tiny whoop) | JST PH (E010)

Ниже я более подробно опишу выбранные комплектующие.
CM275T AIO Camera/VTX
Очень хороший FPV набор, имеет хороший фильтр по питанию и у него нет заметного шума на записях. Просадка напряжения, кажется тоже не влияет на эту камеру. Качество картинки достаточно хорошее в сравнении с другими наборами «все-в-одном». Наиболее важно то, что этот набор меньше и легче, чем другие (типа TX01 или FX797).
Полетный контроллер RacerStar F3D8
Это мой выбор потому что содержит встроенный 8 канальный приемник FrSky.
Регуляторы скорости RacerStar Star4 4A 4-in1 ESC
Подойдут любые регуляторы скорости 4-в-1 размером 16 на 16 мм.
Моторы RacerStar BR0703 15000KV
BR0703 — это самые легкий из продающихся моторов с 15000kv. Есть две версии SE (Special Edition) и не SE (non-SE). Похоже, что они имеют одно и то же обозначение, но разный цвет. В любом случае, я купил оба вида, чтобы все выяснить.
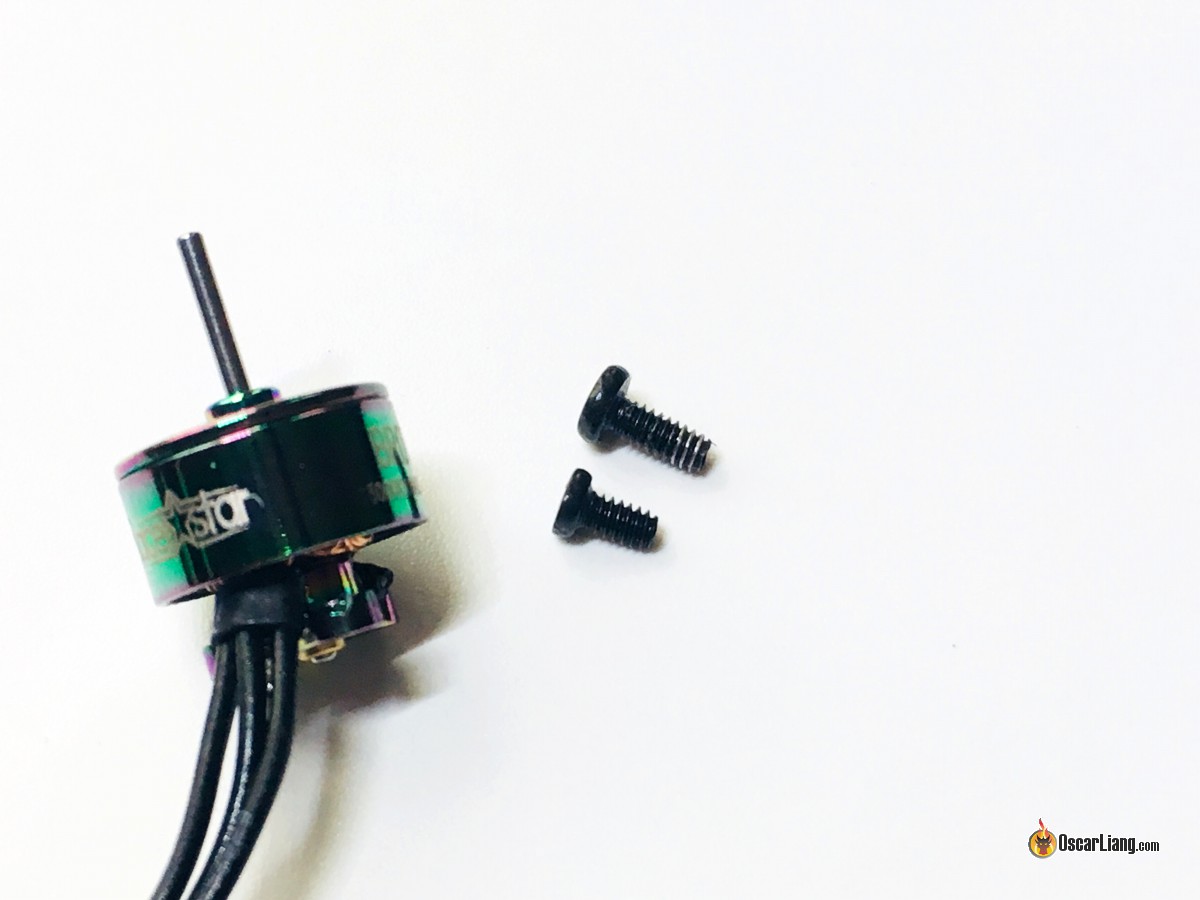
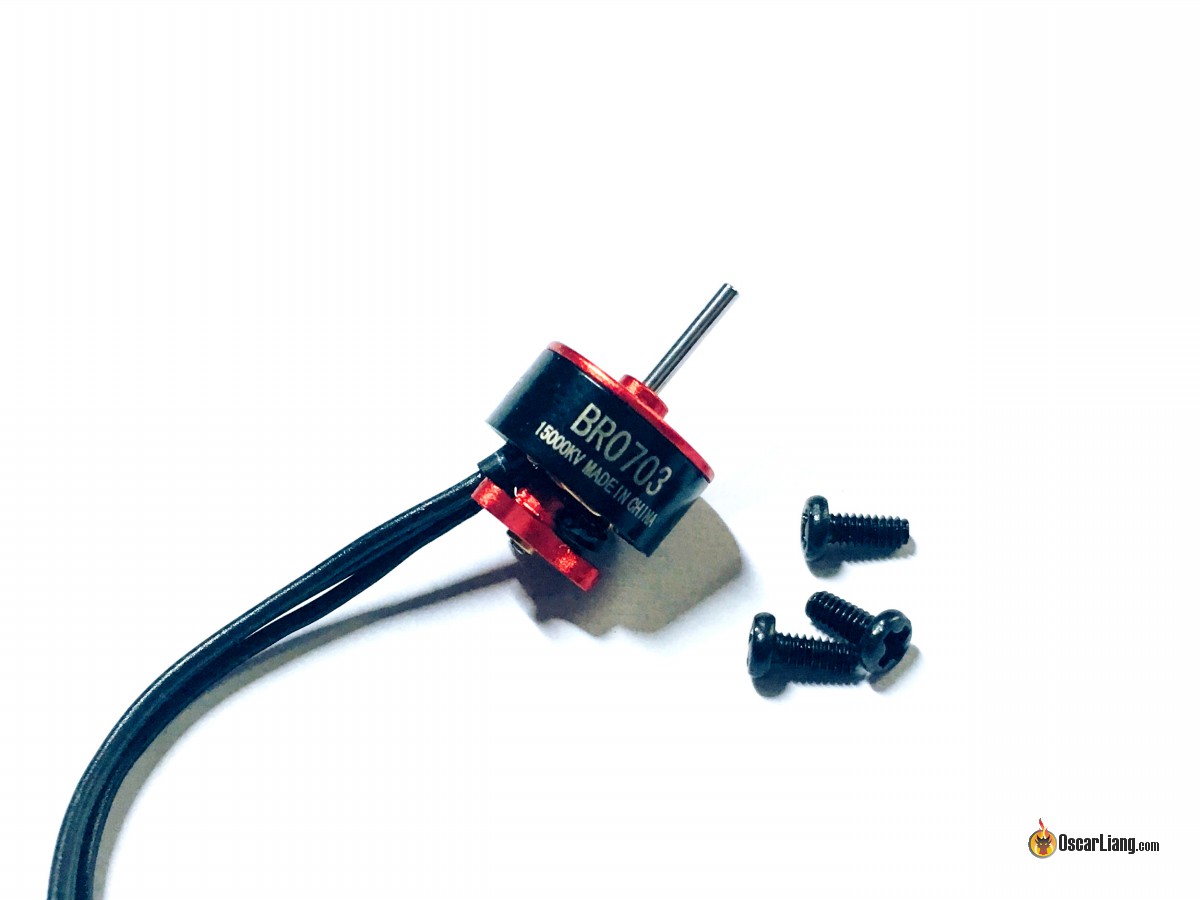
Есть одна несколько раздражающая проблема — это крепежные винтики из комплекта. У версии non-SE они M1.6 длиной 4 мм, а у SE версии — M1.6 длиной 2.5 мм. 2.5 — этого явно недостаточно для моей рамы распечатанной на 3Д принтере, так что если собираетесь использовать SE версию, то я рекомендую купить несколько винтиков длиной 4 мм на ebay ($3 за 20 штук). В любом случае запас не повредит.
Я попробовал использовать 40 мм трехлопастные пропы на этих 15000kv моторах и после 50 полетов они работают нормально. Если что, то можно взять версию с более низким kv — 12000 kv.
Пропеллеры
Для такого коптера подойдут пропы диаметром 31 и 40 мм. Я пока еще не тестировал 31 мм (из-за того, что вал моторов BR0703 имеет больший диаметр, 1 мм, чем отверстие в пропе). Думаю, что 31 мм винты в основном предназначены для TinyWhoop с коллекторными моторами, у там вал диаметром 0,8 мм. Я не так давно купил дрель, чтобы рассверлить отвестия, так что протестирую пропы в конце недели.
LiPo аккумулятор
Я попробовал 3 разных аккумулятора, ниже результаты тестов. Замечу, что у всех этих аккумуляторов разъем типа LOSI, думаю, что для коптеров с 40мм пропами лучше всего подойдут аккумуляторы ёмкостью 300 — 500 мАч. Для 31 мм пропов, видимо нужно использовать что-то более мелкое, 200 — 300 мАч (проверю позже).
40 мм пропы:
| Eachine 25C 500mAh | “Blue” 25C 500mAh | NanoTech 45C 300mAh | |
| Полетное время | 3-4 минуты | 3-4 минуты | 2 минуты |
| Рывок | Средний — сильный | Умеренный | Отличный |
31 мм пропы:
Результаты скоро будут…

Где купить раму Angry Oskie?
Рама «Angry Oskie» разработана специально для тех комплектующих, которые указаны в этом посте. Вся рама печатается на 3Д принтере, дополнительно нужно:
- 4 винтика М2 длиной 25 мм
- 1 резинка (для крепления аккумулятора)
- небольшой кусочек велкро (тоже для крепления аккумулятора)
Также при сборке потребуется несколько проставок M2 и несколько гаек M2, но их можно взять из комплектов полетных контроллеров и регуляторов.
У рамы Angry Oskie 2 размера: 48 и 59 мм, в зависимости от пропов, которые вы планируете использовать (если вы не знаете, что означают эти цифры, тогда читайте наше руководство по рамам для коптеров).
Вес:
- 59 мм рама — 2,2 грамма
- 48 мм рама — 1,7 грамма
- Крепление камеры — 0,9 грамма

Файл для печати доступен на thingverse, так что вы можете скачать его и распечатать, это бесплатно! Если у вас нет 3D принтера, то я могу распечатать и прислать вам раму. На самом деле я отправлю целый набор, который включает в себя:
- Раму 48 мм
- Раму 59 мм
- 5 винтиков М2 длиной 25 мм
- 1 резинку
- Ключ шестигранник M2 (напечатан на принтере)
- 2 маленькие нейлоновые стяжки

Я потратил более 100 часов на разработку этой рамы, её тестирование, сборку коптеров и на написание этого руководства. Постараюсь еще что-нибудь в ней улучшить. Вы можете поддержать этот проект купив у меня раму и запчасти, используйте ссылки на платежную форму здесь. Спасибо!

Руководство по сборке «Angry Oskie»
Сейчас я покажу вам как собрать «самый мелкий бесколлекторный коптер» 🙂 это подробное, пошаговое руководство, попробую показать все детали.
Подготовка
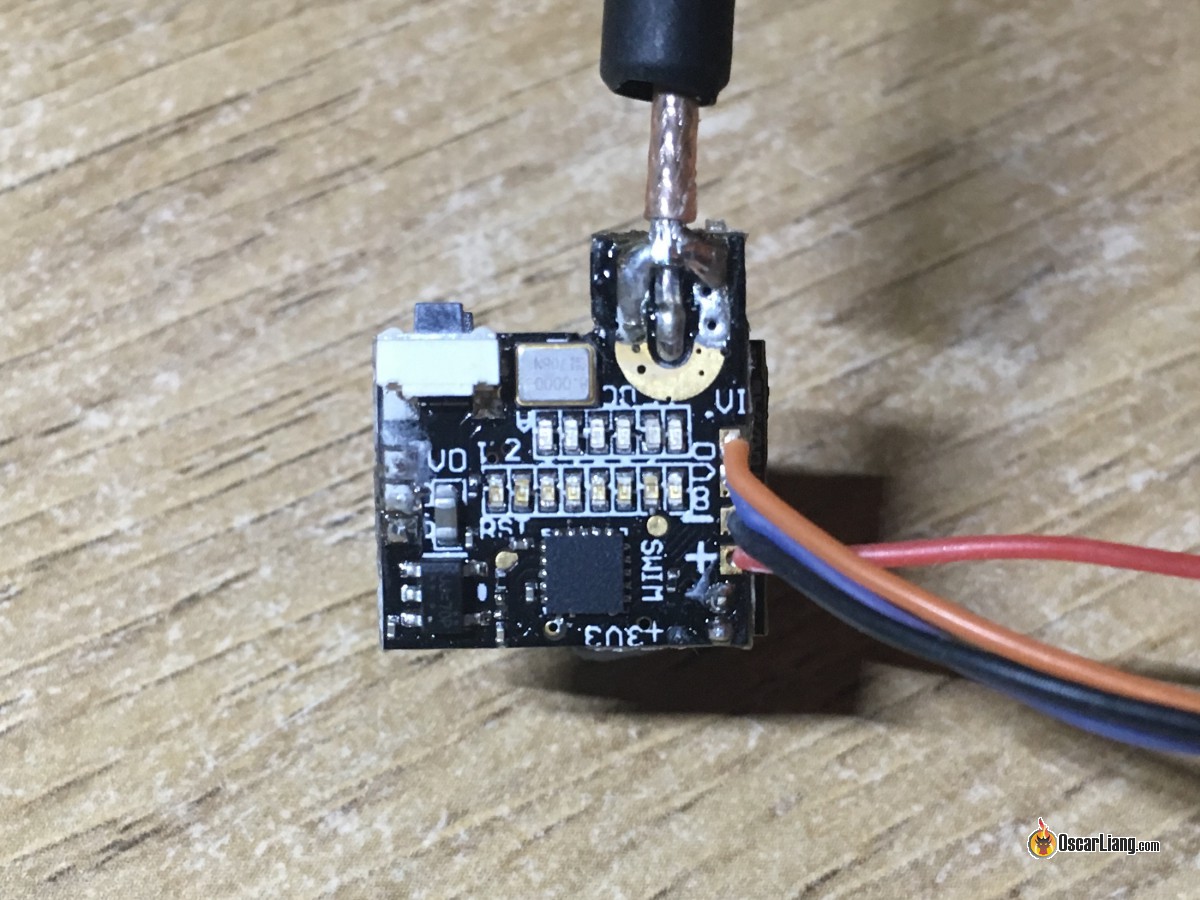
Похоже, что последняя партия камер CM275T идет с 4 проводками, судя по всему, два дополнительных проводка — это видеовход и видеовыход для подключения OSD. Однако, мы не будем использовать OSD, так что можно просто убрать провода и соединить контакты между собой.
Если этого соединения не сделать, то CM275T ничего не покажет.

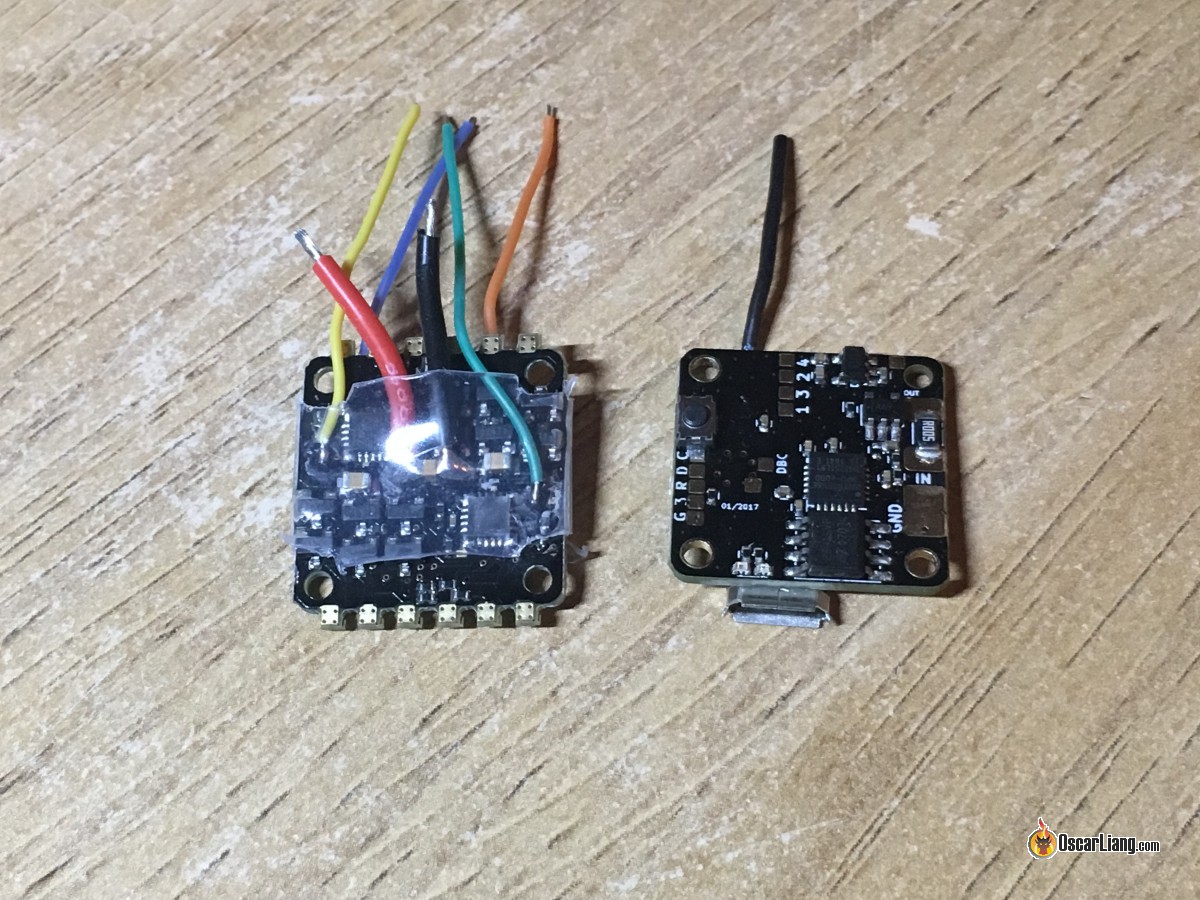
Убираем лишнюю термоусадку около отверстий на регуляторе.

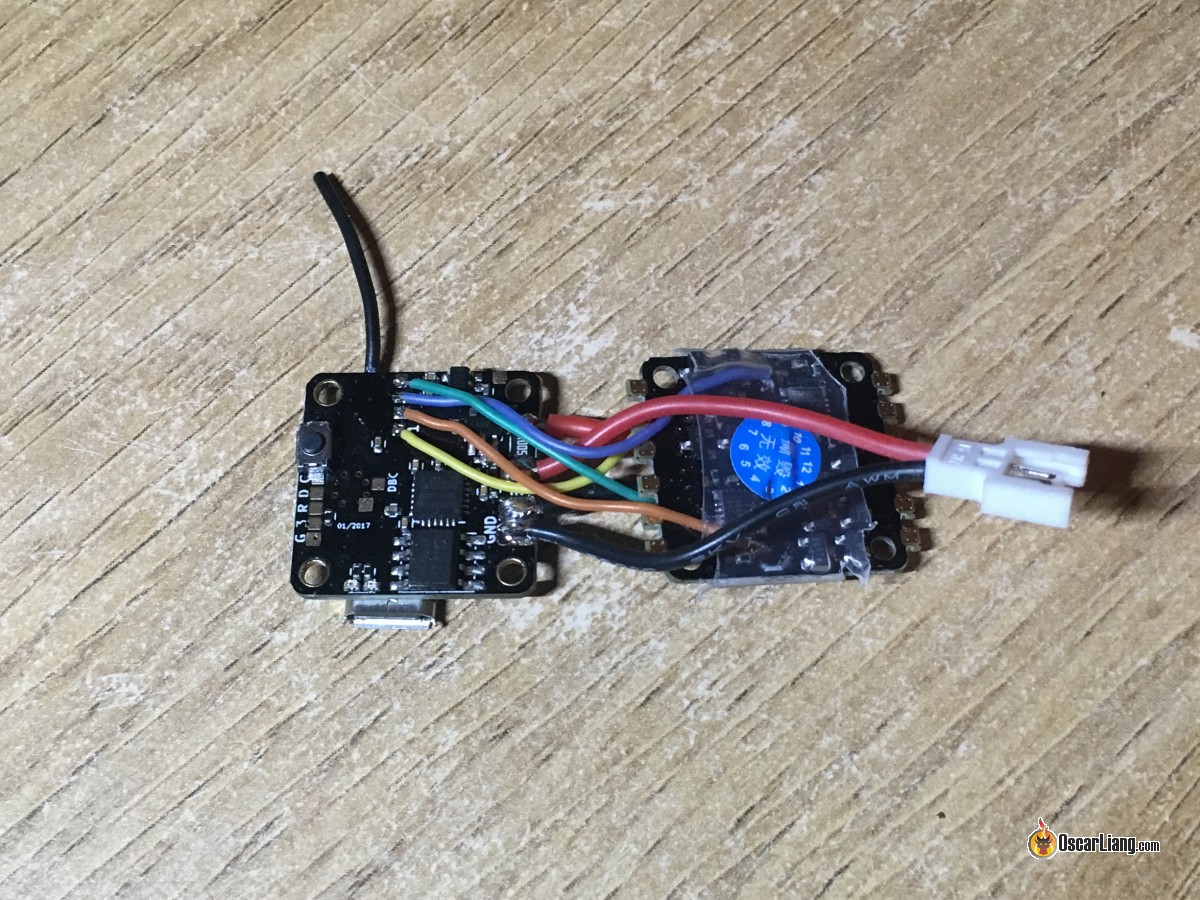
Подключаем регуляторы скорости, полетный контроллер и FPV оборудование
Обрезаем провода у регуляторов до нужной длины. Я настоятельно рекомендую оставить небольшой запас проводов, это сильно упростит сборку. На картинке видно, что я обрезал слишком много, еле удалось собрать!
Также следует проверить порядок моторов, прежде чем собирать. Не уверен, была ли это ошибка в инструкции, но пришлось менять провода несколько раз.
Настраиваем полетный контроллер
(это мои личные настройки, есть что улучшать. Дайте мне знать, если есть идеи)
Я предпочитаю настраивать ПК до установки в раму.
ПК идет с предустановленной прошивкой Betaflight 3.1.5, не стал её обновлять.
Включил DShot600, установил Gyro Rate = 8K, PID Loop = 4K.
Консоль (CLI):
feature MOTOR_STOP set digital_idle_percent = 4.000 set motor_pwm_protocol = DSHOT600 set align_board_yaw = 45 set deadband = 4 set yaw_deadband = 4
Устанавливаем электронику в раму
В этом руководстве я не буду припаивать провода, просто покажу как все соединяется.
Оберните резинку вокруг центральной части и закрепите ее стяжкой. Это наш держатель аккумулятора 🙂
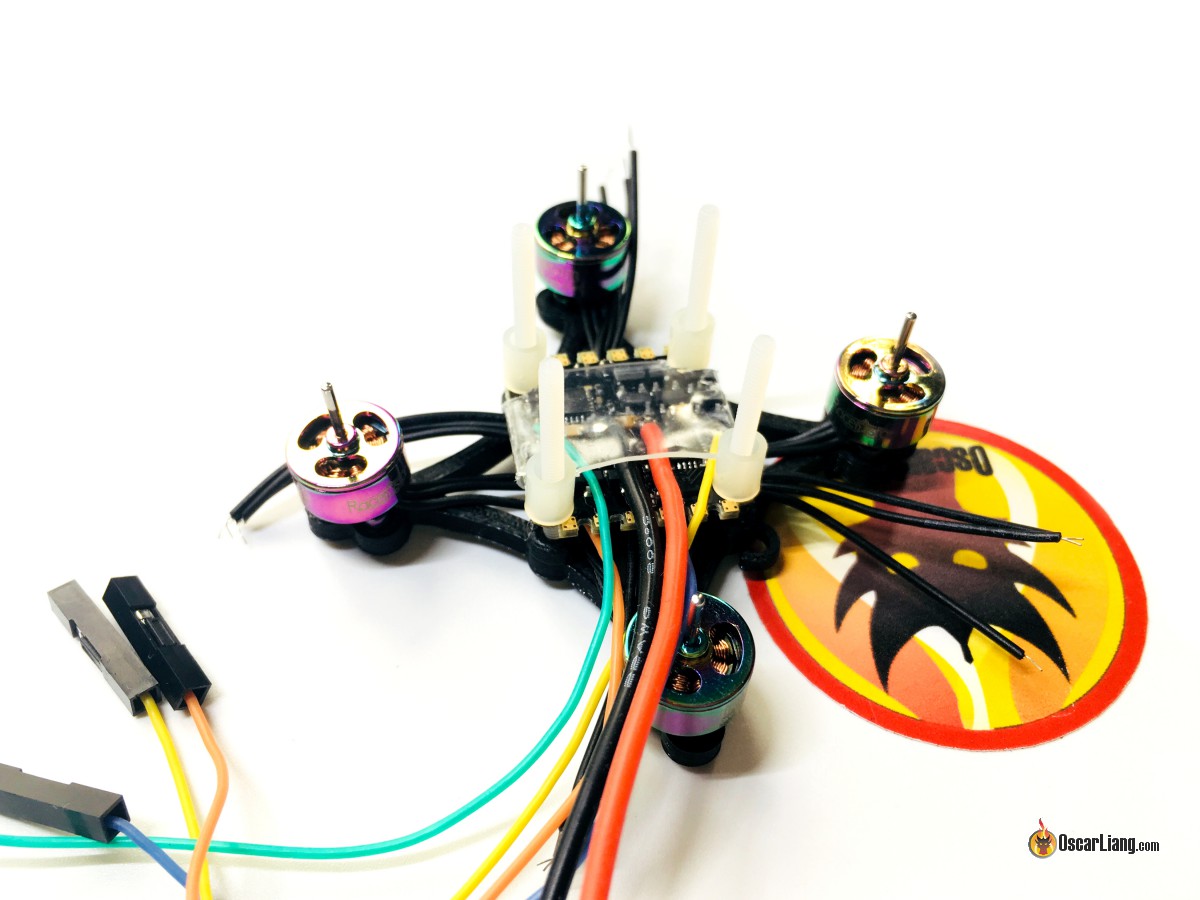
Установите моторы на раму.


Установить регуляторы используя нейлоновые стоки/винты M2 длиной 25 мм, затем оденьте 5 мм разделители (поверх регулей).
Затем очередь полетного контроллера и еще 5 и 3 мм разделители сверху него.

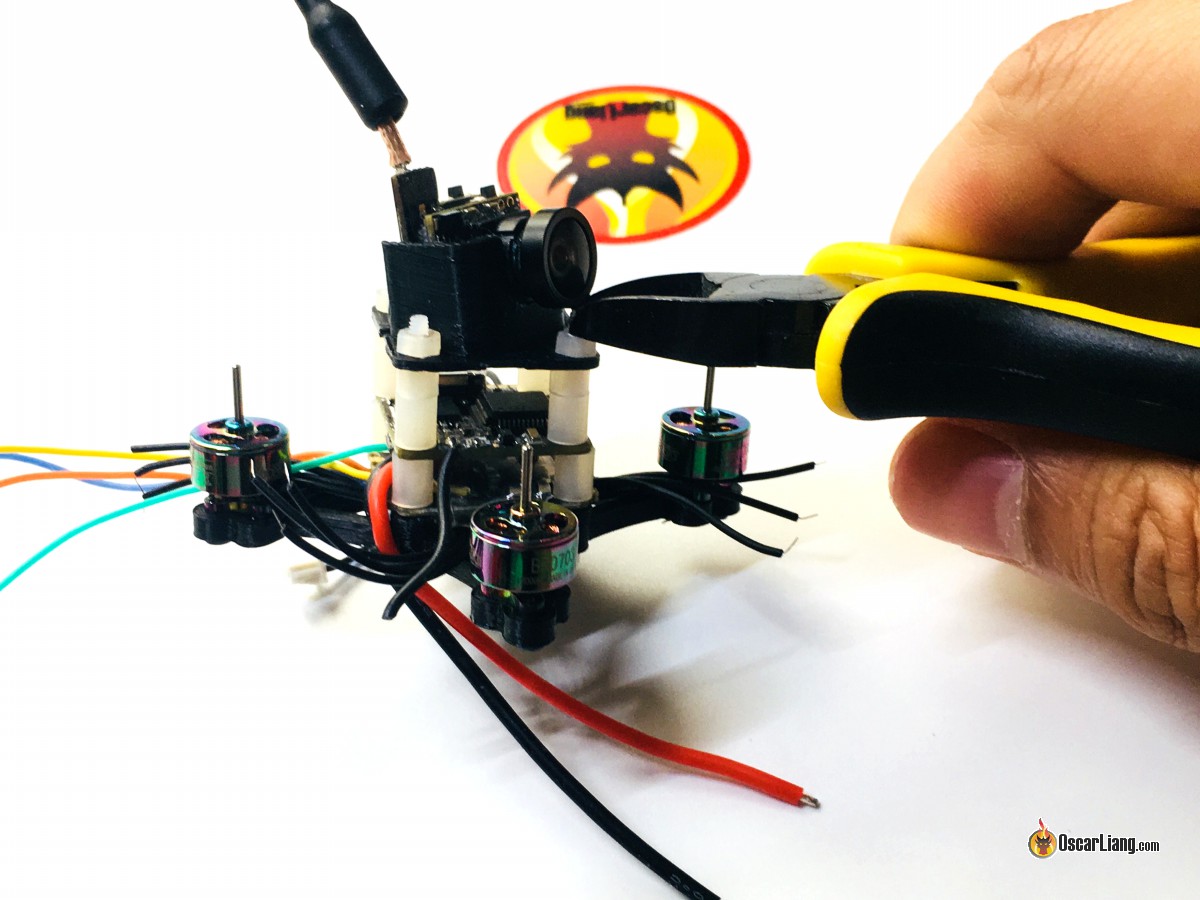
Теперь можно поставить крепление камеры и зафиксировать всё гайками M2 (тут-то и пригодится ключ из моего комплекта).


Ставим камеру в крепление. Держится на объективе, так что просто аккуратно вставьте камеру.
Позади есть небольшая прорезь для проводов питания, она нужна для того, чтобы пропеллеры не порезали провода.


25 мм стойки несколько длинноваты, но их можно оставить как есть, нужно подрезать только одну из них, чтобы она не попадала в кадр.
Сбоку рамы есть крюк для провода от аккумулятора 🙂

Коптер после сборки, крупным планом.
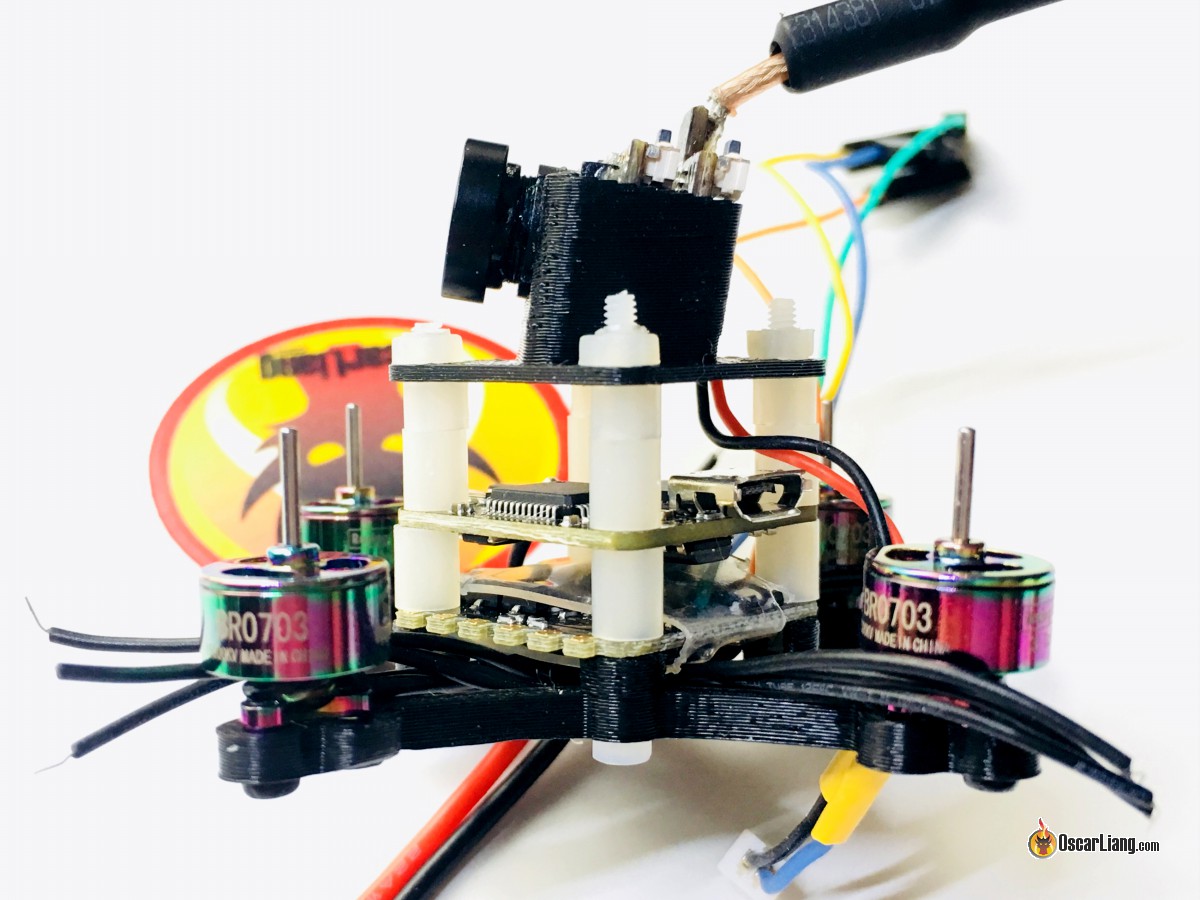

Резинка в качестве крепежа для аккумулятора работает просто отлично. 🙂


FAQ
Обязательно прочтите, если собираетесь собирать Angry Oskie
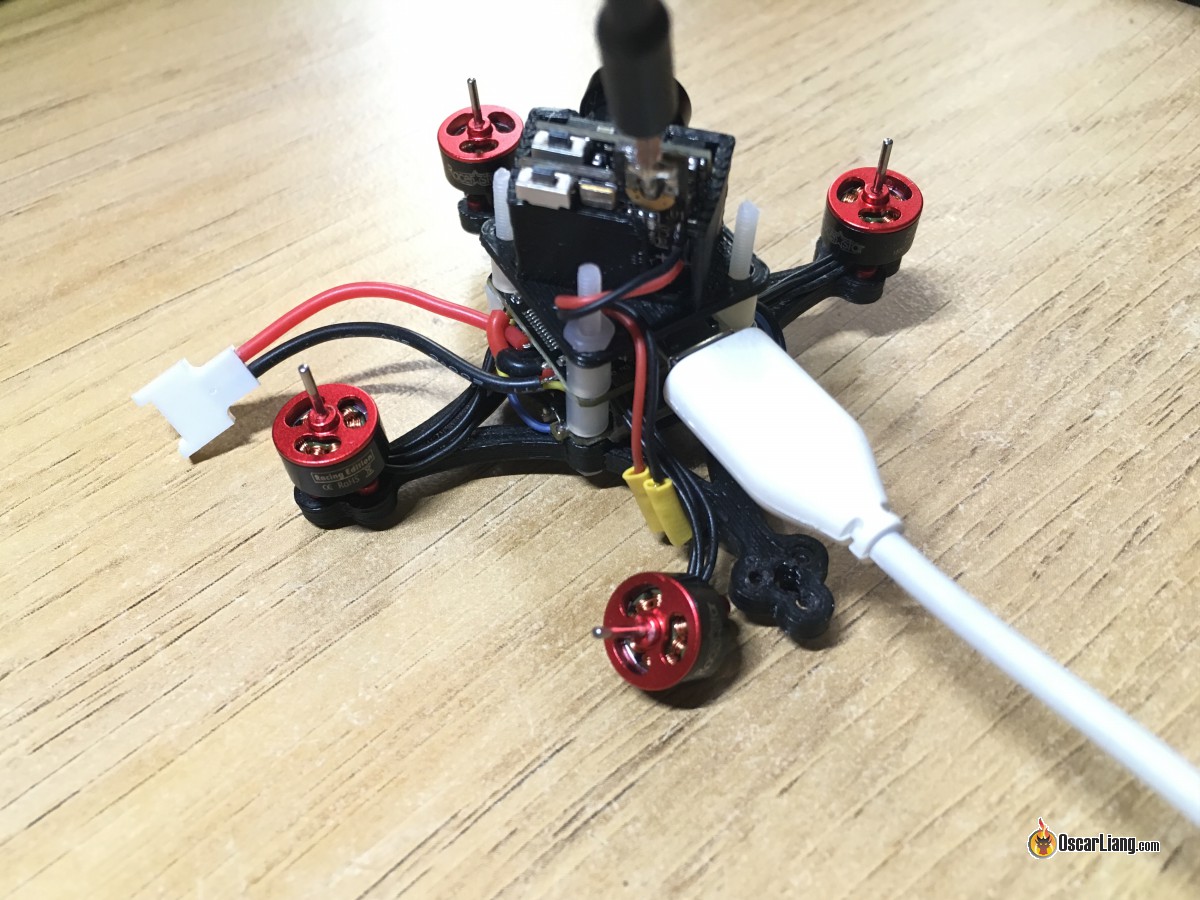
Как подключить USB кабель?
К сожалению, из-за маленьких размеров, доступа к USB порту нет, он закрыт одним из моторов. Советую настраивать ПК до сборки рамы. Иначе придется снимать мотор.
Приемник не работает при подключении по USB
Это нормально для F3D8, он работает только от аккумулятора, не питается от USB.
Когда приземляться?
К сожалению, нет контроля за напряжением аккумулятора. Но я выяснил, что прием сигнала становится неуверенным, когда аккумулятор садится. При этом Таранис начинает сообщать о низком уровне RSSI (RSSI Low) или о его критическом значении (Signal Critical), при этом коптер будет рядом со мной и будет нормально летать. Но это знак, что аккумулятор разряжен и мне пора приземляться.