В этом руководстве мы рассмотрим обе версии: обычную и Micro, разберемся как настраивать и использовать прошивку MW-OSD, а также, как подключать к Naze32 и приемнику.
Оригинал: MinimOSD Micro Setup Tutorial – Naze32 PID Tuning via OSD Menu, Display RSSI Voltage
Что такое MinimOSD и Micro MinimOSD
MinimOSD — это вероятно наиболее мощное и доступное OSD для квадрокоптеров и других мультикоптеров.
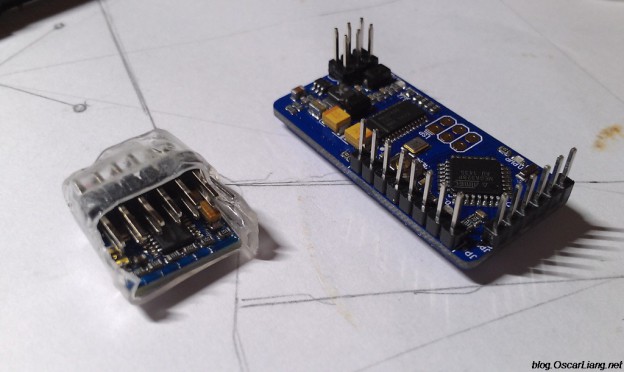
Недавно вышла новая версия Micro MinimOSD! Она обладает абсолютно теми же возможностями, что и полноразмерная версия, но имеет меньший размер (мы сравниваем с версией KV Team Mod, которая имеет контакты для RSSI, датчика тока, напряжения аккумулятора, так что не требуется дополнительной пайки основного чипа на плате).
Купить Micro MinimOSD на Banggood | GearBest| AliExpress
Несмотря на то, что настройка значительно сложнее чем прочие OSD, типа Super Simple OSD или E-OSD, которые вставил и они сразу работают, MinimOSD имеет множество преимуществ, а внешний вид экрана полностью настраивается.
Наиболее полезные функции: отображение координат GPS, настраиваемые стили и шрифты, используя экранное меню можно менять коэффициенты ПИД регуляторов, рейты и т.д. Пример того что можно отобразить на экране.
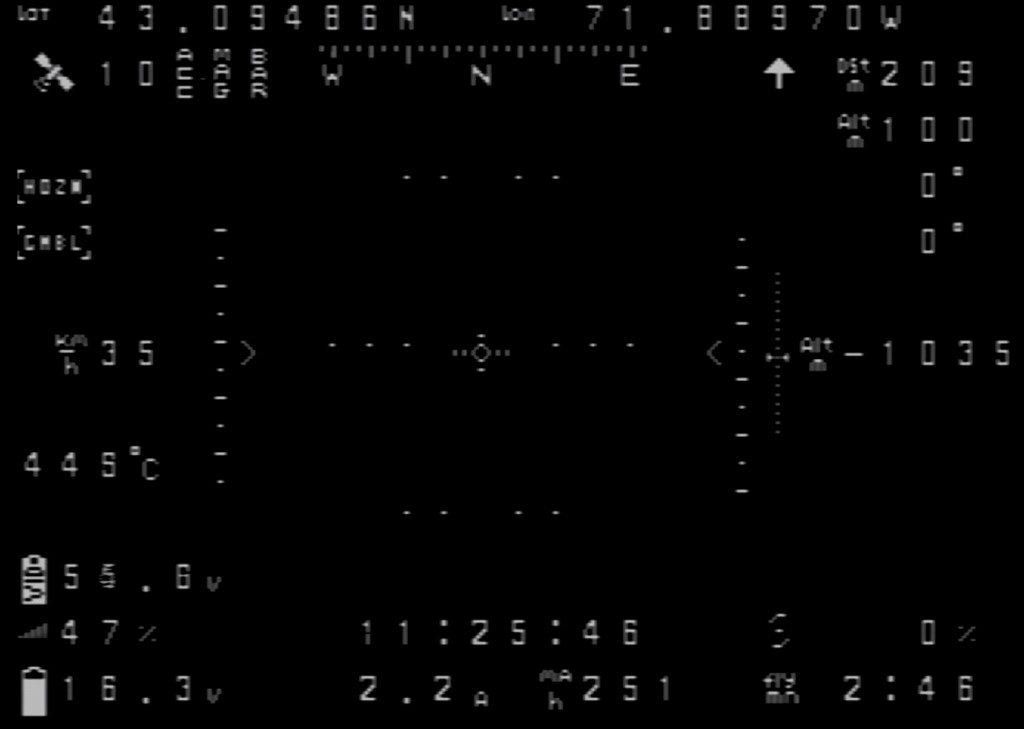
Настройка ПИД коэффициентов через меню:

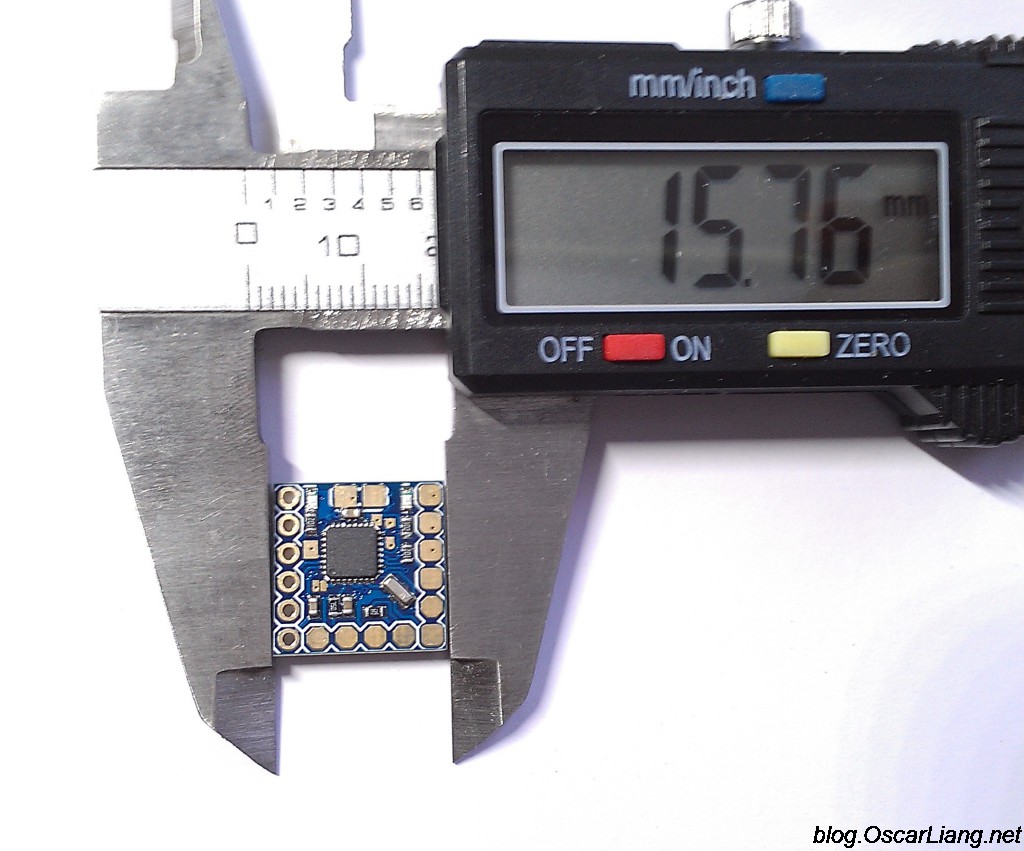
Размеры, вес, распиновка, пайка для уменьшения габаритов
Полноразмерная версия MinimOSD
Эта OSD существует уже много лет. Плюс этой версии (MinimOSD с KV Mod), в том, что у нее сбоку есть контакты для подключения датчика тока, RSSI, датчика напряжения и т.д. Раньше, мы должны были сами очень аккуратно припаивать провода прямо к ножками чипа и это было очень сложно. Эта версия сильно облегчила жизнь. Я себе купил одну такую плату (версия 2)

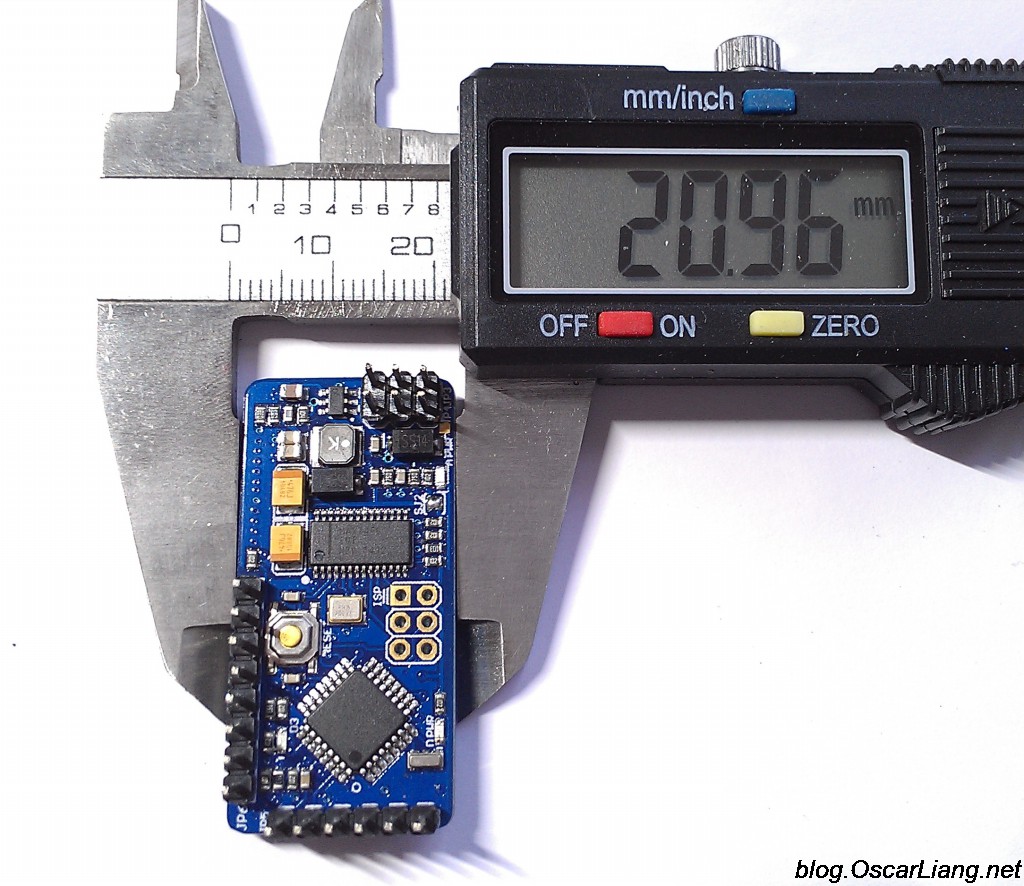
Размеры MinimOSD с KV Mod V2: ширина 21mm, длина: 43mm, вес: 5.5g (включая разъемы).
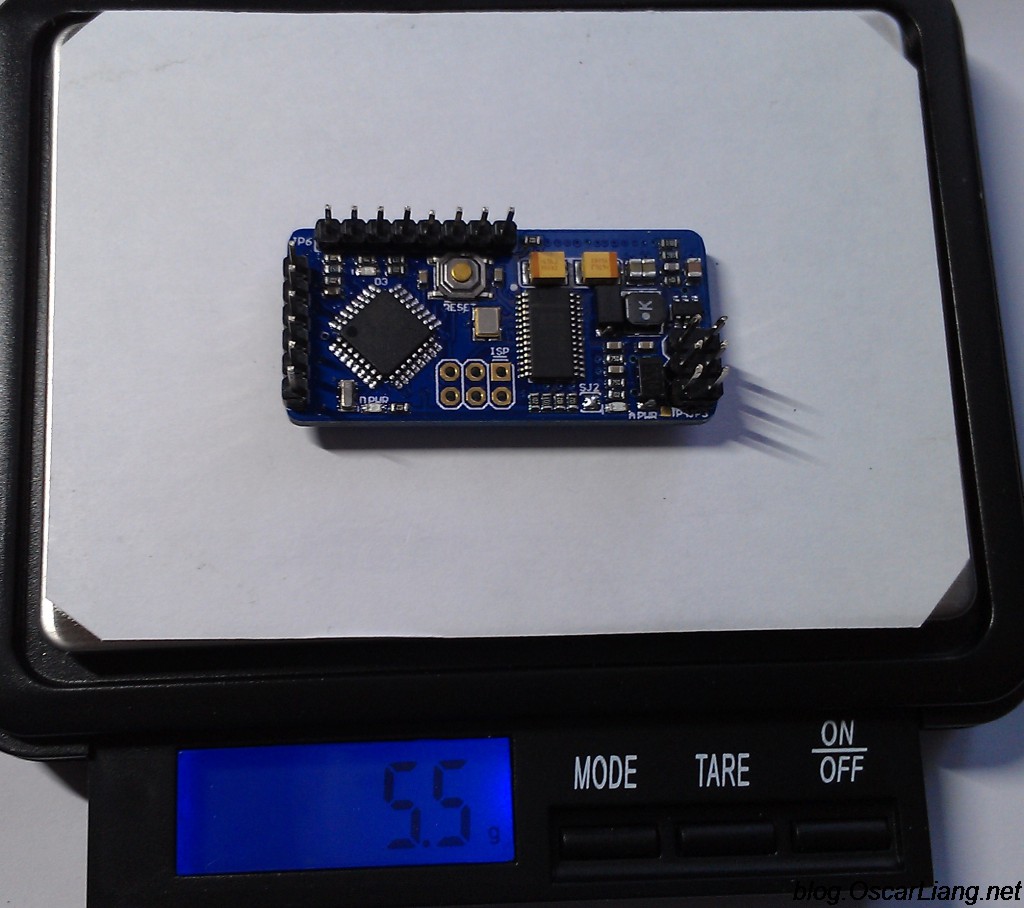

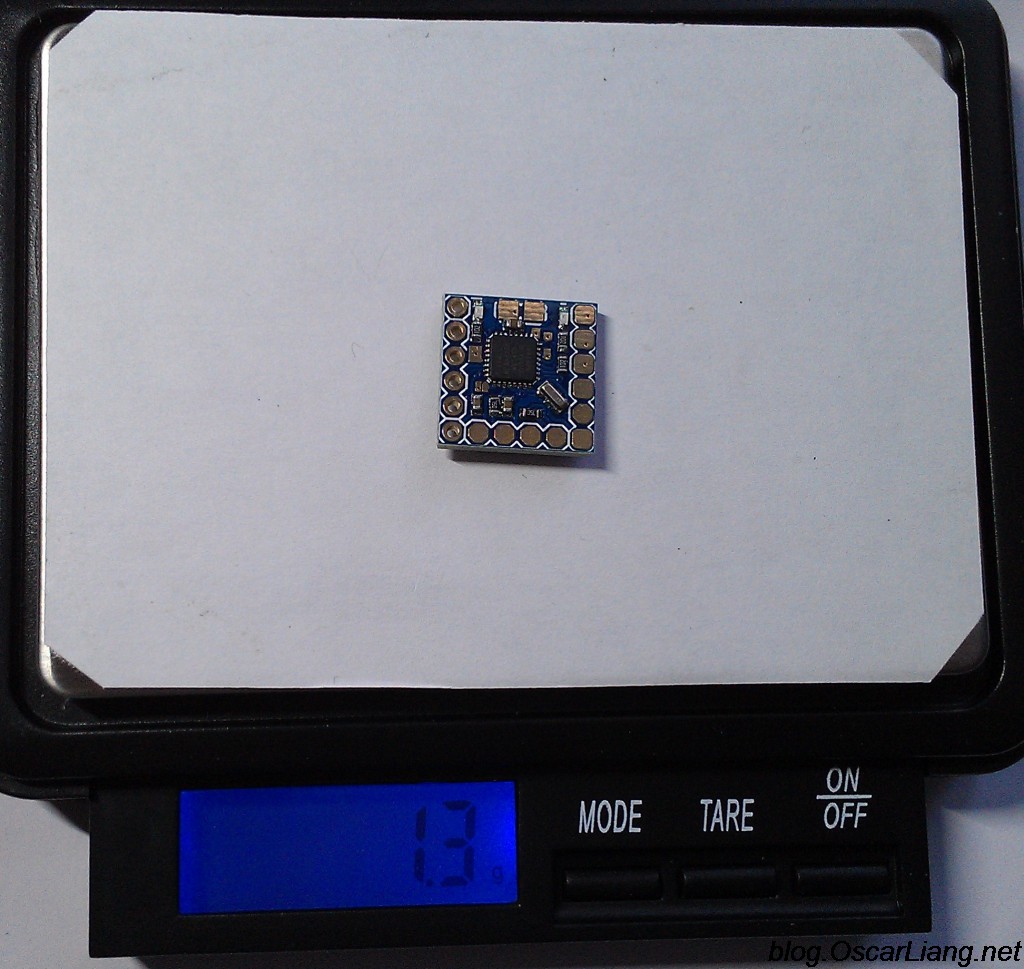
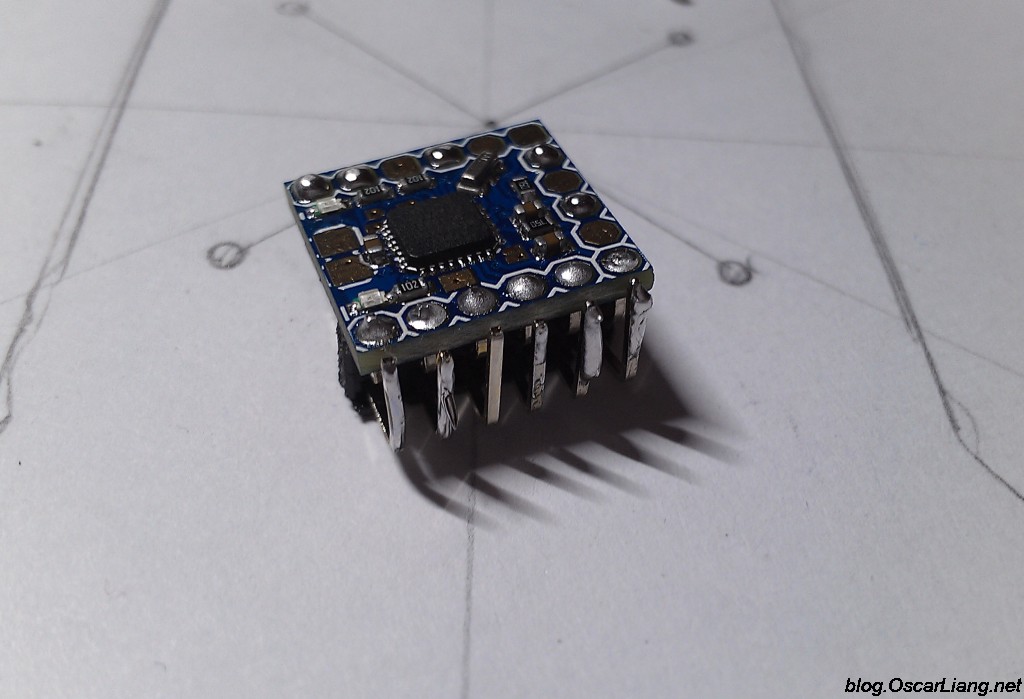
Micro MinimOSD
Я поражен микро размерами этой OSD, а ведь она обладает всеми возможностями полноразмерной версии. Кроме возможности питания от 12В, которое в старой версии почти никогда и не использовалось, из-за перегрева платы. Так что было очень разумным выкинуть этот функционал и уменьшить размер.

Микро версия примерно 1/3 полной по весу и размеру.

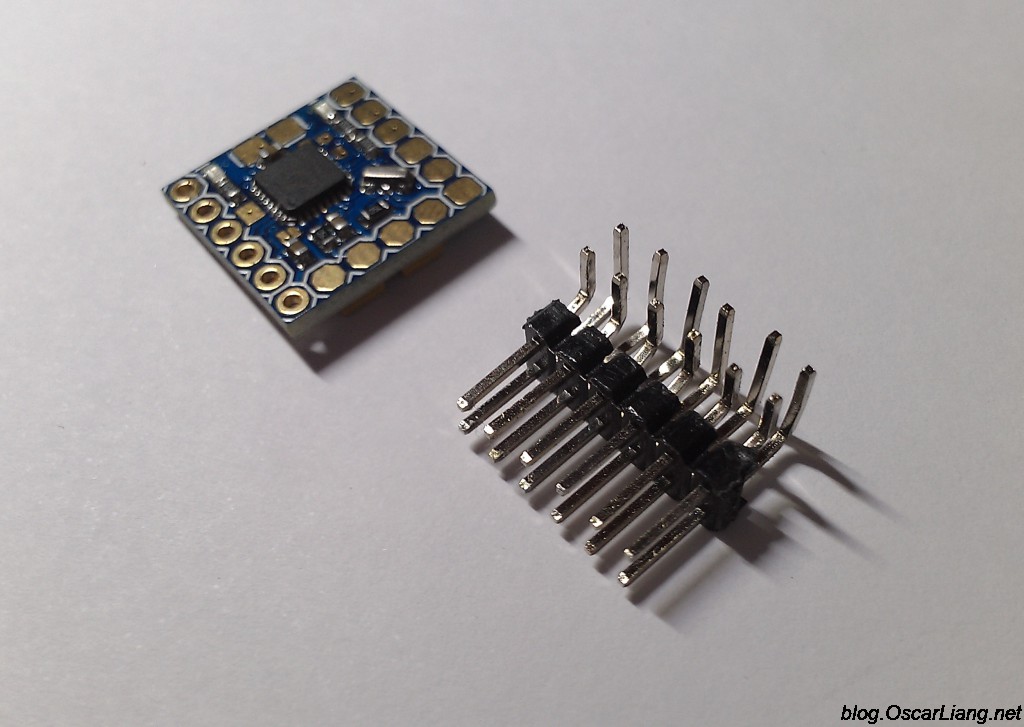
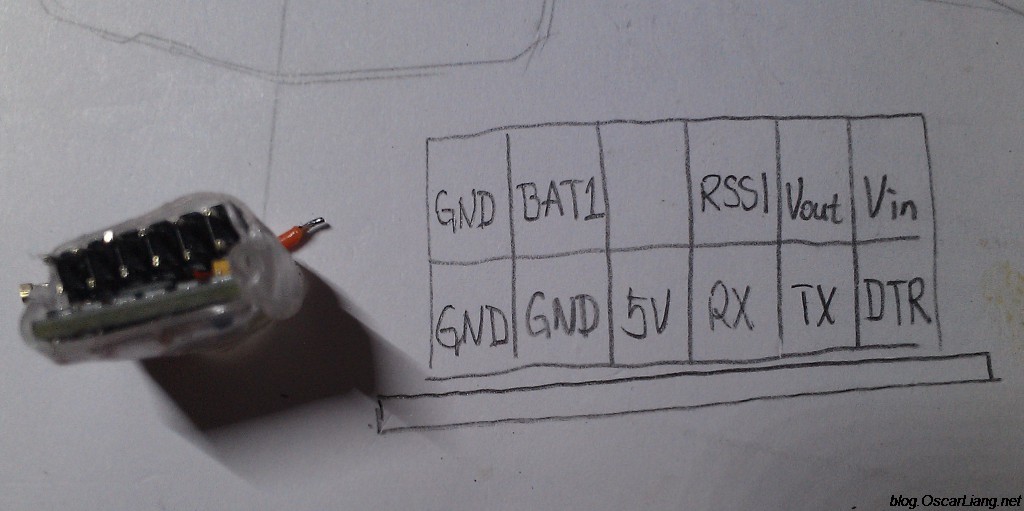
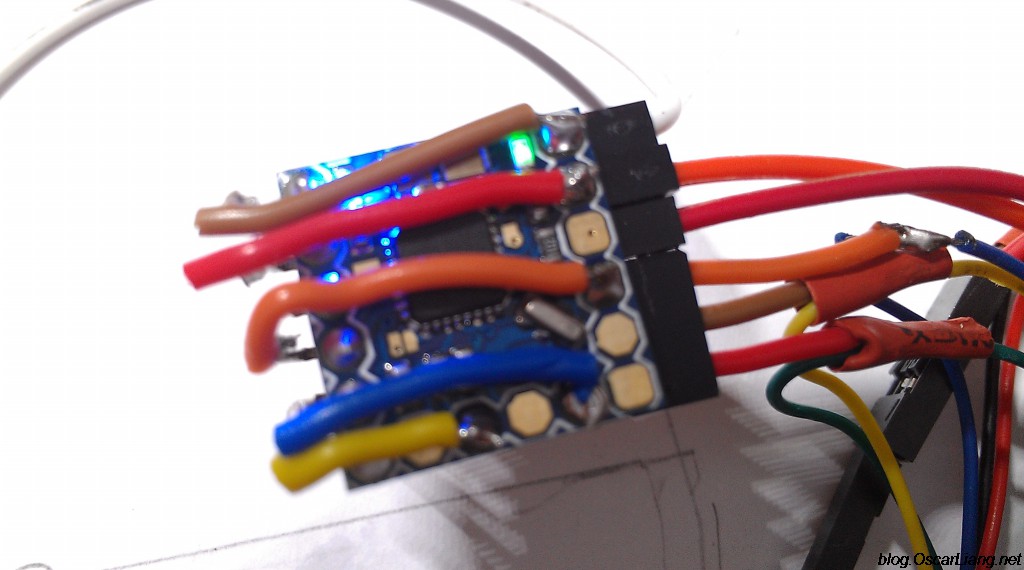
Паяем разъемы
Припаять разъемы к полноразмерной версии MinimOSD было легко и просто, но что касается микро версии, мне не нравятся способы которыми народ обычно припаивает их
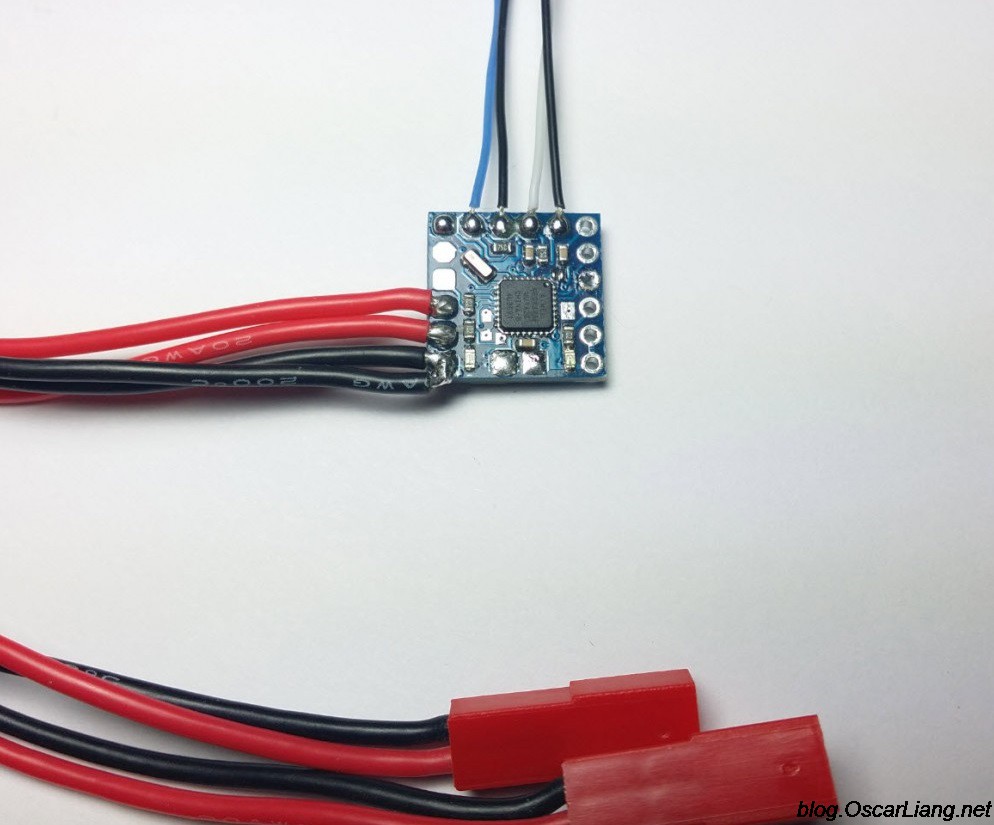
Мой креатив: нужно использовать угловые разъемы вместо прямых, так что у меня появляется дополнительное свободное место при установке внутри коптера.

В самом конце упаковываем в термоусадку для защиты пайки и проводов.

Подключаем к Naze32, аккумулятору, приемнику, камере, видео передатчику
Сборка моего коптера очень простая. Тут на схеме все что должно быть соединено: Naze32, LiPo, приемник, FPV камера и видео передатчик.
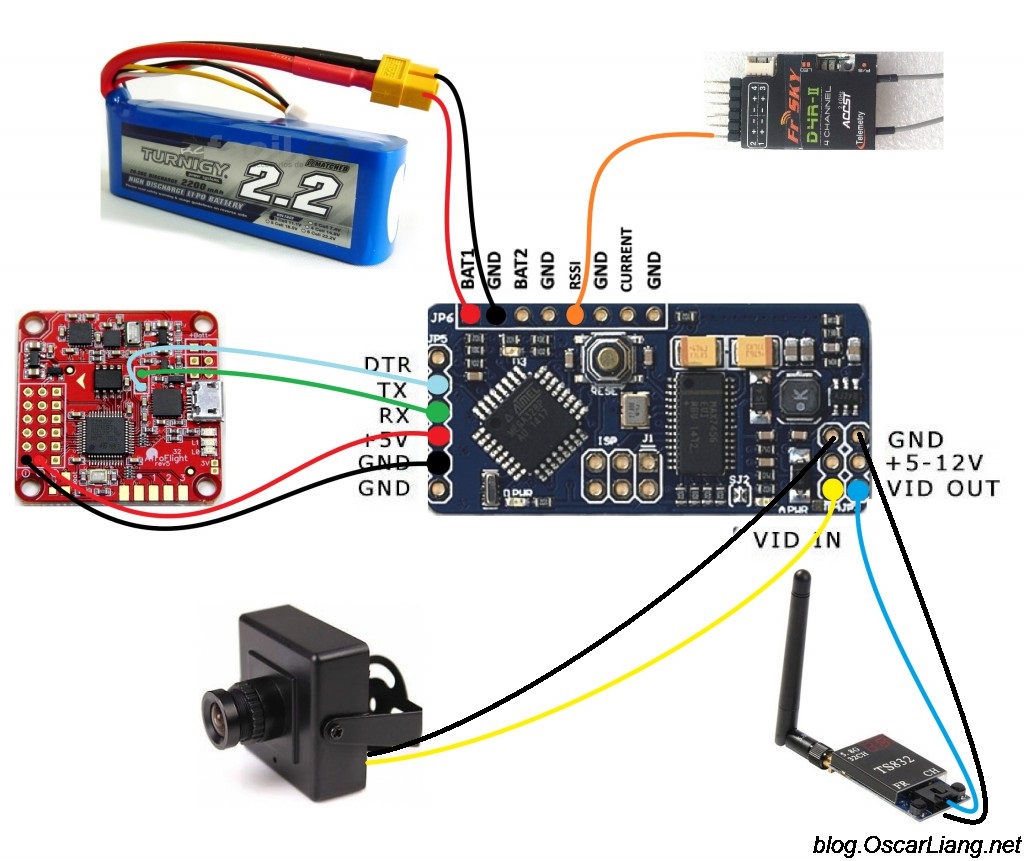
Схема соединения обычной MinimOSD с Naze32, камерой, приемником, видео передатчиком, аккумулятором.
Как подключить микро версию:
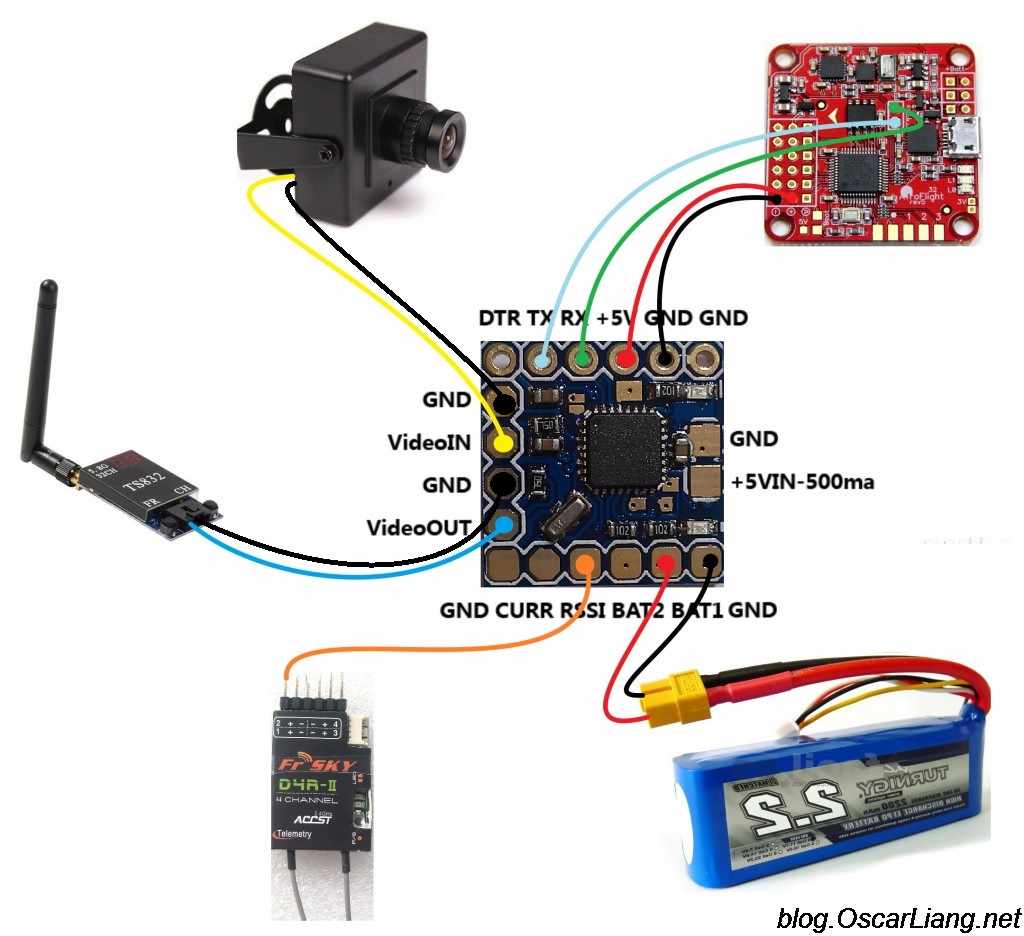
Micro MinimOSD, подключение к Naze32, камере, приемнику, видео передатчику и аккумулятору
Часто задаваемый вопрос 1. Некоторые жалуются на то, что текст пропадает при увеличении газа. Решение: подключить всю электронику — камеру, OSD, видео передатчик к общей земле.
Часто задаваемый вопрос 2. OSD не отображается, только картинка с камеры. Решение: попробуйте поменять стандарт PAL/NTSC в настройках OSD.
Контакт VBAT1 подключается к основному литиевому аккумулятору, чтобы показывать напряжение. Контакт RSSI подключается к приемнику управления, чтобы отображать уровень сигнала (в случае если приемник это FrSky D4R-II, в режиме CPPM, тогда Pin1 — это PPM сигнал, PIN2 — выход RSSI).
Подключение к Naze32 через последовательный порт (TX и RX) позволит Naze32 передавать полетные данные на экран (GPS, направление по компасу и т.д.), а OSD сможет менять ПИД коэффициенты полетного контроллера, при помощи пульта управления.
Будьте внимательны! Подключение к компьютеру использует тот же самый последовательный порт, это значит, что если вы хотите использовать Baseflight или Cleanflight configurator, то вы должны вначале отключить TX и RX от OSD.
Без подключения к последовательному порту MinimOSD будет работать самостоятельно отображая RSSI и напряжение.
Если вы используете Taranis в режиме PPM, прочтите эту статью: как получить RSSI на отдельном канале (без дополнительных проводов), англ.


Вот так это выглядит внутри моего мини квадрика.
Настраиваем при помощи MW-OSD GUI
Существует довольно много прошивок для MinimOSD, моя любимая Multiwii-OSD (mwosd). Текущая версия 1.3., ее конфигуратор — очень удобная программа. Экранное меню понятное, прошивка обновляется, имеется поддержка Cleanflight и Baseflight. Еще она позволяет настраивать ПИД коэффициенты прямо через экранное меню.
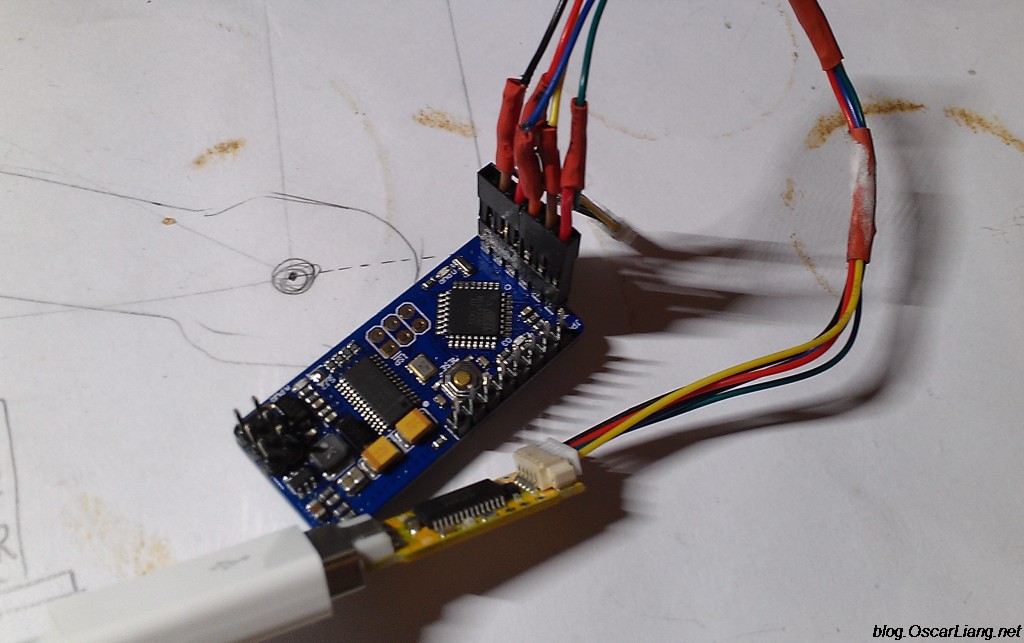
Подключаем MinimOSD к FTDI программатору
Как для настройки так и для прошивки требуется FTDI адаптер. Подключение идет по 5 проводам: DTR (GRN), TX, RX, 5V и GND.

Настраиваем MinimOSD при помощи MW-OSD GUI
Через графический интерфейс можно настроить отображение любых полетных данных. Т.к. я летаю на миникоптере, все что мне нужно — это напряжение аккумулятора, RSSI и таймер. Я использую литиевые аккумуляторы 4S, и предупреждение о низком заряде установлено на 13.6В (3.4В на ячейку, хотя я должен поставить порог повыше). Для конфигурации 3S, напряжение при котором появляется предупреждение можно поставить на 11В. Я использую FPV в формате PAL

Единственная вещь о которой стоит побеспокоиться, это напряжение аккумулятора. Значение по умолчанию далеко от идеала, так что вы должны поиграться с настройками, чтобы получить корректное значение. Как я это делаю:
Значение по умолчанию для «voltage adjust» = 200, и напряжение показываемое OSD было 21.0В. Я взял мультиметр, замерил напряжение на аккумуляторе, и получил 11.1В (вместо мультиметра можно использовать сирену с вольтметром, типа такой, прим. перев.)

Теперь уменьшим значение «voltage adjust «до 110, теперь на экране OSD у меня отображается 11.5В. Чтобы избежать постоянных изменений параметра туда-обратно, мы должны посчитать точное значение при помощи математики и информации которая у нас уже есть 🙂 Мы должны вычислить сколько вольт дает 1 значение параметра «voltage adjust».
(21.0-11.5)/(200-110) = 9.5/90 = 0.1056
Мы знаем что правильное значение на экране должно быть 11.1В, так что значение «voltage adjust» должно быть:
110 — (11.5-11.1)/0.1056 = 106.21 (106 подойдет)
Значение «voltage adjust» можно поменять не только в конфигураторе, но и через экранное меню, так что не нужно подключать MinimOSD к компьютеру и использовать конфигуратор.
Arduino в качестве программатора для MinimOSD?
Я пробовал использовать мою Arduino UNO в качестве FTDI программатора (англ.), как я это делал ранее для других устройств. У меня получилось менять параметры OSD через программу MW-OSD GUI. Однако я столкнулся с проблемой при перепрошивке MinimOSD, сообщение об ошибке было:
avrdude: stk500_getsync(): not in sync: resp=0x00.
Похоже какая-то проблема с синхронизацией данных, но я убедился что правильно подключил DTR к RESET на плате Arduino, не знаю что еще можно сделать, так что я использовал свой FTDI программатор для перепрошивки MinimOSD.
OSD Меню: настраиваем ПИДы, Rate, напряжение, RSSI
Меню OSD (OSD Menu) это моя самая любимая фишка, и в основном поэтому я отказался от SuperSimple OSD. Есть очень много параметров, которые Вы можете изменить без подключения к компьютеру. Например, я могу менять значения ПИД коэффициентов прямо в поле, используя свой пульт, без bluetooth и компьютера! Однако нельзя поменять параметры roll rate и pitch rate по отдельности в Cleanflight (англ.), в настоящий момент они связаны (можно менять только сразу оба, прим. перев.) В новой версии эти параметры будут независимыми.
Чтобы попасть в меню MW-OSD вначале нужно дизармить коптер, затем:
- газ в середину
- рысканье (yaw) — вправо
- тангаж (pitch) — вперед.
Чтобы перемещаться по меню:
- Крен/тангаж (pitch/roll) — для перемещения по меню
- Рысканье (yaw) — для изменения значений
Содержание меню:
- PID Config (Roll/Pitch/Yaw PID для различных полетных режимов)
- RC Tuning (RC Rate, RC Expo, Pitch/Roll Rate, Yaw Rate, TPA (Throttle PID Att)
- Voltage (показывать или нет напряжение, значения «Adjust Voltage», «Voltage alarm», «Cells»)
- RSSI (показывать или нет)
- Current (показывать потребляемый ток или нет, его настройка)
- Advanced (единицы измерения: метры/дюймы, сигнал: Pal или NTSC, компас)
- Display (переключатели, газ, GPS координаты, датчики, подвес и т.д.)
- Статистика (расстояние, макс. высота, макс скорость, время полета)
Перепрошивка
Некоторые продавцы MinimOSD сами прошивают последнюю версию, так что вам не нужно мучатся с перепрошивкой. Но может быть потом вам захочется обновить прошивку или попробовать другую, чтобы проверить версию прошивки включите OSD на коптере, и посмотрите надпись на экране загрузки.
У каждой прошивки в инструкции детально описано как прошивать. Это краткое содержание:
- Скачать файлы прошивки.
- Скачать Arduino IDE
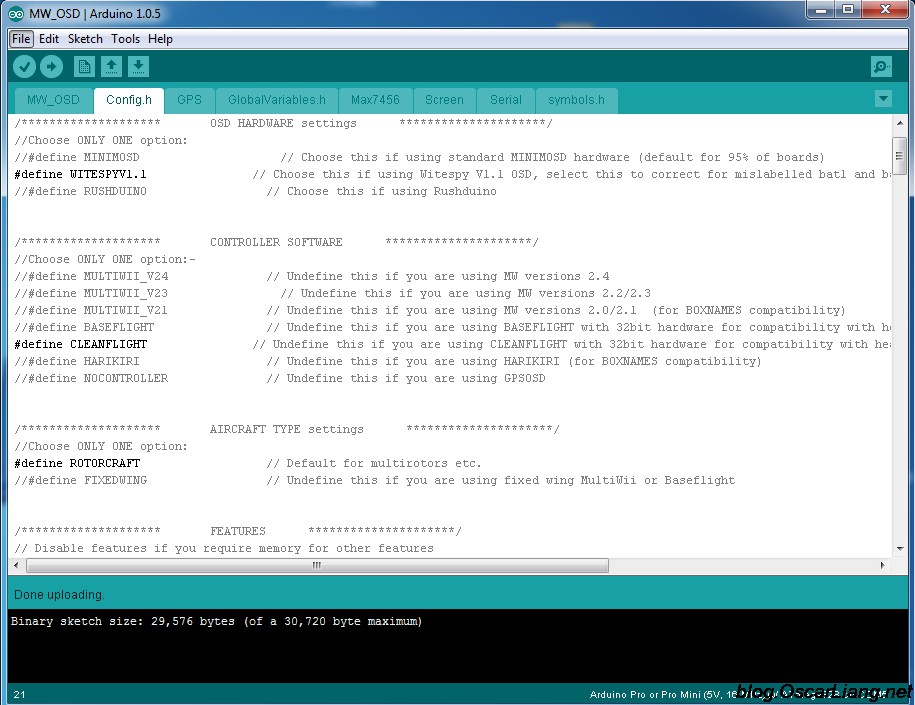
- Открыть файлы прошивки в Arduino IDE
- Поменять настройки, если нужно
- Я менял не много, только тип платы (WitespyV1.1) и прошивку полетного контроллера (Cleanflight)
- Подключить FTDI адаптер (программатор) к MinimOSD / Micro MinimOSD
- Нажать Compile и Upload
Купить Micro MinimOSD на Banggood | GearBest| AliExpress
Do you know howI can get the rssi value out of the x? All the setup that you describe stays the same, micro minimosd, naze32 and I will try to flash betaflight.
I’m sorry, I can not help you.
> Часто задаваемый вопрос 1. Некоторые жалуются на то, что текст пропадает при увеличении газа. Решение: подключить всю электронику — камеру, OSD, видео передатчик к общей земле.
У меня так получилось, что с камерой осд вообще не отображается. если откоючить камеру — то работает.
Как именно стоит одну землю запаивать? у меня так вышло что с передатчика дополнительная земля запитана какраз на ОСД, а от камеры запитана на бек. Стоит ли просто землю камеры запаять на ОСД? или как лучше поступить?
В первую очередь проверить настройки PAL/NTSC в камере и в OSD.
Схему соединения земель не понял. Мультиметром проверьте землю на камере и землю на OSD — должно звонится.
>проверить настройки PAL/NTSC
проверял все ок и до какого то момента работало, как начал летать — перестало
>Схему соединения земель не понял
земля камеры запаяна на плату распределения питания к 12 вольтовому регулятору напряжения
Все таки каким то образом слетели все настройки и PAL стало NTCS, как такое могло произойти ?
Скорее всего когда-то перепрошивали OSD и после этого не поменяли или в конфигураторе случайно ткнулись.
Не подскажете микро осд может работать с Apm 2.6 ?
Да, от обычной minimOSD отличается только питанием. Статей на эту тему достаточно много, просто будьте внимательны при подключении.
http://apmcopter.ru/apm/apm-setup/minimosd-proshivka-nastroyka-podklyuchenie.html
200/21=9,523 число на один вольт
9,523*11,1=105,7 voltage adjust
Не знаю как вы там считали, но так проще
Подскажите пожалуйста можно ли ОСД перепрошить для другого ПК ( c Naze32 на F4) ?
Да, конечно. А прошивка какая? Betaflight/Cleanflight?
Стоял Cleanflight на NAZE 32 и микро OSD (возникли проблемы при обновлении версии перестал видит s.bus приемник) перешел на Betaflight. Теперь дурит гироскоп решил обновить и заказал на B.G. Betaflight CC3D REVO F4 STM32F405. Вот думаю достаточно будет перепрошть под новый ПК или придется менять OSD?
Нормально все будет.
ЗЫ: Если еще не пробовал, то обрати внимание на Serial Passthrough.
Можно ли подключить Mico MinimOSD к APM 2.6 так,чтобы показания были как на втором фото (они глазу приятнее и понятнее), а то показания на прошивке для APM 2.6 мне не нравятся?
Честно говоря не совсем понял что имеется ввиду. Шрифт? Спецсимволы типа аккумулятор, спутники? Если так, то можно просто поменять шрифты.
Когда мы прошиваем под APM там и шрифты и вид горизонта другой, а хотел бы что бы вид был как на MultiWii
Или нужно просто загрузить шрифты от MultiWii
Подскажите пожалуйста, реально ли использовать микро в кастомном проекте (управление летающим крылом, где и приемник и пульт построены на ардуинке и модулях)?
Другими словами — есть описание, как слать полетные данные в нее по сериал? Описание протокола?
Вначале определитесь с прошивкой для MinimOSD, от этого и будет зависеть формат передачи данных.
Как вариант — взять за основу MWOSD и исходники Betaflight или Arducam и исходники ArduPilot.
В описаниях к соответствующим автопилотам формат и найдете, либо целиком возьмите библиотеки (например формат mavLink).
у меня при увеличении газа пропадают данные осд, видео передается нормально, земля общая т.к. запитано всё (esc, контроллер, сервы(через отдельный бэк), передатчик, видео передатчик, камера (через отдельный бэк), осд питается с контроллера) от одного аккума, какие еще могут быть варианты?
Микросхема max7456 очень чувствительная, видимо помех много.
Для начала поставить Low-ESR конденсатор https://blog.rcdetails.info/kondensatory-dlya-filtratsii-shumov-v-mini-kopterah/
Потом можно попробовать отдельный LC фильтр по питанию OSD, ну или хотя бы мелкий танталовый кондер как можно ближе к OSD. https://blog.rcdetails.info/lc-filtr-dlya-fpv/
в общем это для меня осталось загадкой, но перепаял землю с камеры и передатчика на осд и всё заработало верно, не понимаю в чем секрет т.к. земля и до этого была одной для всего 🙂
простой одной земли мало, нужно чтобы еще земляных петель не было. 🙂
Добрый день! Осд миним с прошивкой r1.9 на апм. Аппаратура фс6. Ре могу зацти в меню, хосу править пиды в поле, но осд не реагирует на аппу.
Проверьте калибровку каналов и их порядок, чтобы быть уверенным что делаете правильный «жест» для входа в меню
Тоже мучался с меню.. Тоже на FS6. Квадрик работает, осд информацию норм отображает а меню никак не вызывалось. Вспомнил потом что на аппе убавлял расходы. Баловался с расходами пока в симуляторе летал.. То есть осд не видело максимальные отклонения стиков. Вернул на аппе расходы и меню заработало.
Проверил калибровку — все ок. Да и квадрик-то летает нормально. Может в конфигураторе что-то настраивается?
А можно поподробней о том, что где стоит и как подключено? а то из предыдущего сообщения мало что понятно 🙂
Квадрик: F450 на АПМ 2.8. Аппаратура FSIA6B через PPM. OSD minim. в ней прошивка MW-OSD R1.9 ( пробовал и более ранние). Все работает норм, только вот ОСД не реагирует на аппу. Не входит в меню. Включаю квадрик и аппу. В момент загрузки (и позже) Делаю газ на середину и рыскаю вправо, одновременно с этим тангаж на максимум (пробовал и влево и разные другие комбинации). На экране ничего не меняется. При загрузке ОСД показывает версию прошивки и как войти в меню. Далее включается рабочий режим ОСД.
Пардон, упустил, что речь про АПМ, я за ним давно не слежу и давно не пользовался, так что тут ничего не подскажу.
Ну разве что порядок каналов: RETA или AETR и т.д. и что эти данные действительно доходят до OSD
Спасибо! Буду думать как проверить сигналы на ОСД от аппаратуры из АПМ)
Еще хочу добавить, что у меня настроено переключение между экранами на тумблер 6 канала аппаратуры. Значит сигналы все-таки идут.
Можно попробовать назначить переключение между экранами (или RSSI) на первый канал и посмотреть как значения в OSD меняются от этого канала, потом второй канал и т.д. чтобы убедиться что значения которые видит OSD неинвертирвоаны, находятся в полном диапазоне значений и порядок каналов правильный.
Только не забудьте рассказать, как найдете причину.
О! Хорошая идея. Спасибо! Буду пробовать.
Добрый вечер! Проверил все каналы через RSSI. В итоге почему-то OSD не видит третий канал (газ). Но это только касаемо OSD. так-то газ правильно работает. Есть какие-то идеи как и где это исправляется?
А может порядок нарушен? Т.е. видит, но, допустим, на 8м канале, а не на 3?
А это как-то настраивается в осд? В АПМ и аппаратуре видно что все каналы настроены как надо (крен -1; Тангаж-2; Газ — 3; Рысканье — 4 канал). И второй вопрос — можно как-то поменять комбинацию для входа в меню?
К сожалению, не знаю. Гугл в помощь! 🙂
Спасибо! А может в этой версии (R1.9) не быть этого меню?
Думаю есть смысл спросить у разработчиков 🙂
Подскажите пожалуйста, при подключении micro minimosd к порту uart2 контроллера SP Racing F3, можно ли запитать osd напряжением+5в от разъема самого порта?
Судя по распиновке там как раз 5 вольт, значит можно; проверьте только суммарный потребляемый ток всех устройств, чтобы не перегрузить BEC.
Спасибо за информацию.
У меня PDB Matek, у которой BEC 5v на 2А. Подскажите пожалуйста, сколько ориентировочно потребляет micro minimosd?
До 0.5 А
Добрый день подскажите по max7456
В полетном контроллере сгорела микросхема max7456.
Выпаял сгоревшую и впаял новую, но к сожалению
Betaflight osd не работает после замены max7456. Видео картинка есть? а osd нет.
В настройках betaflight osd пробовал заливать шрифты? но это не помогает.
Этот max7456 чип нужно как-то отдельно прошивать?
Настройки NTSC/PAL уже проверили?
Да в авто все стоит.
Надо попробовать выбрать нужный режим руками. Несовпадение стандартов — самая частая причина пропадания телеметрии.
День добрый, проблема с OSD. После установки и нескольких дней полетов внезапно информация с OSD стала зависать т.е. примерно через минуту-две полета все показатели кроме видео просто застывали. Еще несколько полетов показали, что такие зависания происходят не всегда т.е. можно спокойно отлетать всю батарею, а можно получить зависание при арминге на земле или через минуту полета.
Что за плата? MinimOSD или что-то другое?
Как вариант: помехи по питанию или теряются данные (проверьте провода/контакты)
Хорошая статья. Жаль не описано как подключить и отладить показания потребления тока. Я установил датчик тока ACS712. Выход этого датчика подключил к входу CURRENT и….ни че го. Показания потребеления — хорошая штука но не понятно, способна ли OSDшка подсчитывать расход или нет, алгоритм работы этой опции и как это вообще настроить?
Здравствуйте. Есть несколько вопросов: 1. У меня полетный контролер SPracing F3 с прошивкой betaflight это значит прошивку надо заливать под betaflight или spracing как полетный контролер?
2. У меня виде передатчик FrSky X4RS, что бы отображался сигнал RSSI это надо с него (с ноги CPPI) подкинуть проводок на OSD RSSI ?
3. Для подключения использую UART 2 (TX, RX, +5V, GND), Напряжение не отображается, пишет 0 V, это надо отдельно запитать OSD контакты BAT1 и GND?
4. При арме пульта на экране пишется дизарм, OSD к полетнику подключено RX-TX, TX-RX, пробовал и в PAL и NTSC, что может быть еще?
1. Нужно выбирать правильный Target у Betaflight (тип платы для которой предназначен файл с прошивкой), ищите SPRACINGF3.
2. отображать можно по разному, и через OSD и через полетный контроллер. ИМХО лучше через ПК
3,4. хоть какие-то данные с полетного контроллера показываются? например горизонт. PAL/NTSC — вообще к данным не относится (раз OSD чтото отображает, значит PAL\NTSC трогать не нужно). Что за прошивка OSD?