Телеметрия с регуляторов скорости позволит вам контролировать их температуру и обороты двигателей. Также можно узнать потребляемый ток без необходимости подключения отдельного датчика тока на ПК или PDB (контроль в реальном времени над током и израсходованной емкостью аккумулятора).
В этой статье я покажу вам, как настроить телеметрию (ESC Telemetry) в Betaflight и вывести значения на экран (OSD).
Оригинал: How to setup ESC Telemetry in Betaflight
Ограничения связанные с использование телеметрии регуляторов
Датчики тока, встроенные в ПК или плату распределения питания, обычно ставятся сразу после разъема XT60, так что записывается весь потребляемый ток.
Телеметрия с регуляторов в принципе может заменить датчик тока на ПК/PDB, но это неточный способ измерения, т.к. измеряется только ток, потребляемый моторами. Потребление всей остальной электроники: FPV оборудование, приемник и т.д. — не учитывается.
Betaflight ESC Telemetry довольно ограничена в возможностях при отображении данных на экране (ноябрь 2017).
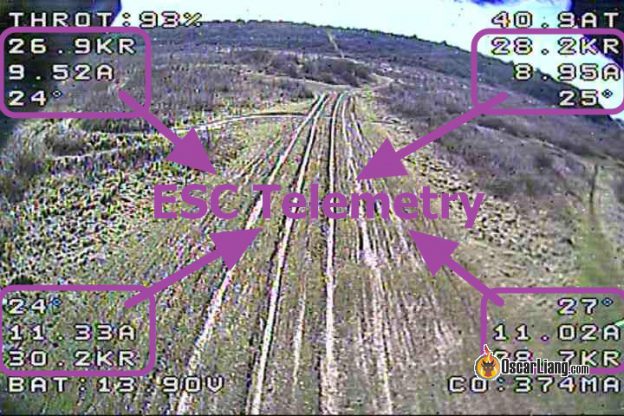
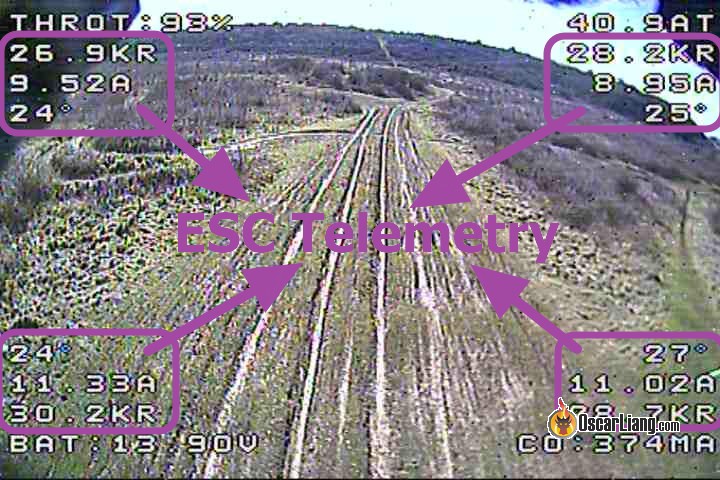
На заглавной картинке этой статьи видны обороты, температура и потребляемый ток каждого регулятора/мотора, это мой квадрик с ПК и регуляторами KISS. На мой взгляд, эта конфигурация очень полезна для анализа поведения коптера и моторов.
Телеметрия KISS
В Betaflight вы можете показать только температуру наиболее горячего регуля и средние обороты моторов.

Телеметрия в Betaflight
На сколько я знаю, в Betaflight 3.3 будет больше параметров для отображения (надеюсь будет как в KISS OSD).
Требования
Железо и прошивка
- Регуляторы с BLHeli32, у них должен быть пин для телеметрии (TX) и обновленная прошивка. Я тестировал вот эти:
- Полетный контроллер на F3, F4 или F7 с прошивкой Betaflight 3.1.0 (или новее) с одним свободным последовательным портом (UART)
- Betaflight Configurator 1.8.5 или новее
Дополнительная информация:
Как настроить телеметрию в Betaflight OSD?
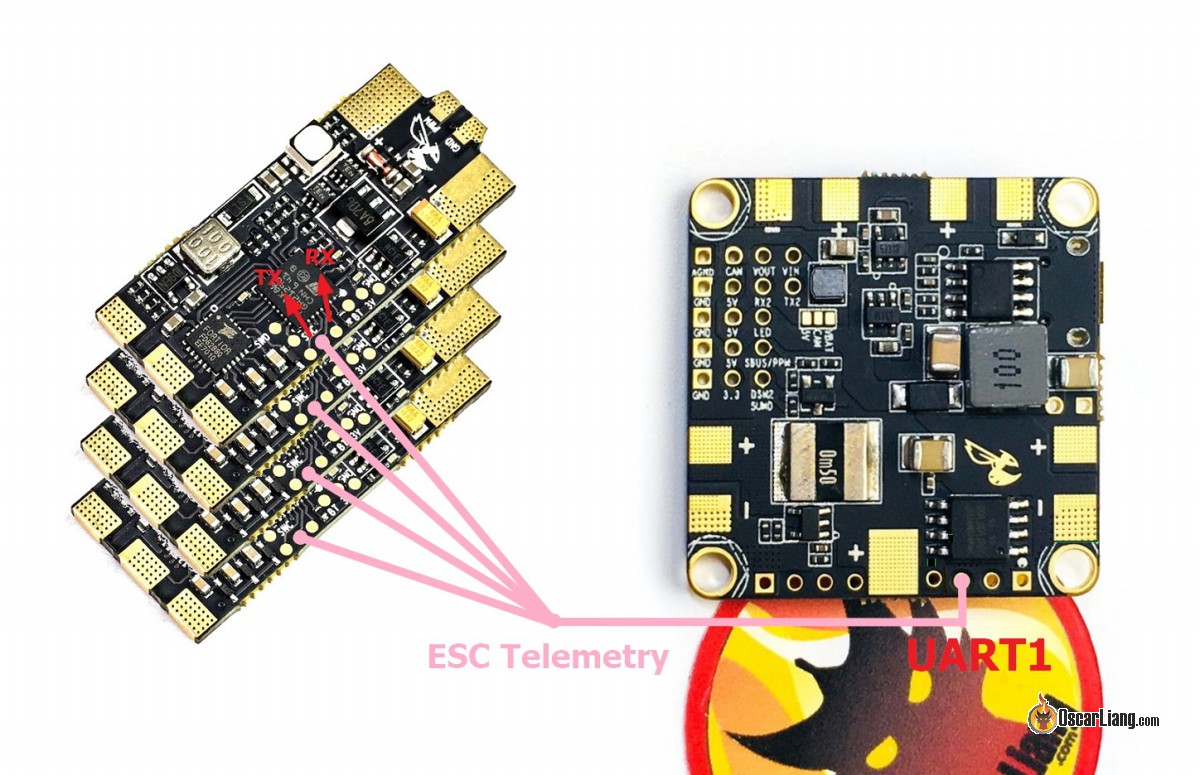
Просто подключите все пины TX (контакты для телеметрии) со всех регуляторов к одному контакту RX свободного аппаратного UART на полетном контроллере. Полетный контроллер сможет читать данные со всех регулей по очереди.
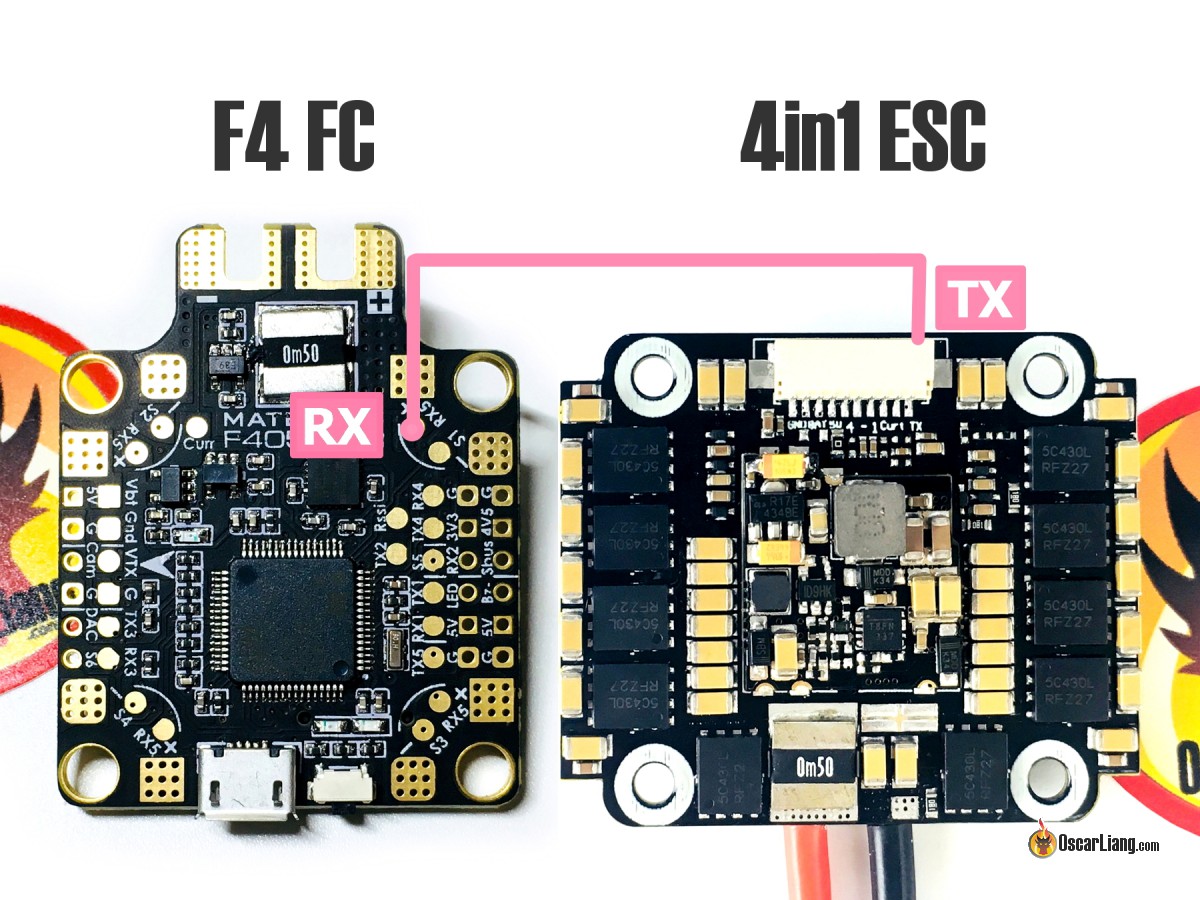
При использовании регуляторов 4-в-1 будет всего один контакт TX. Его и надо подключить к RX на ПК.
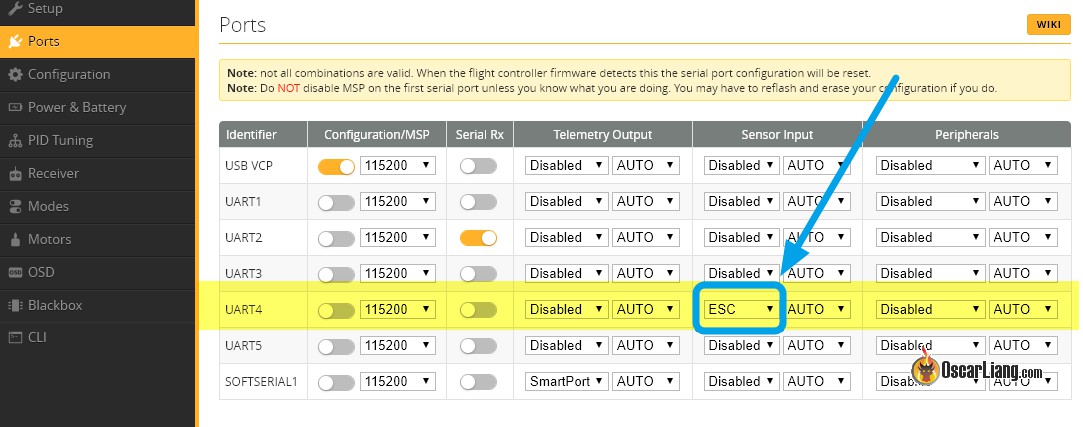
В первую очередь открываем Betaflight Configurator и идем на закладку Ports, находим там наш порт и в разделе Sensor Input выбираем «ESC«. Нажимаем «Save«.
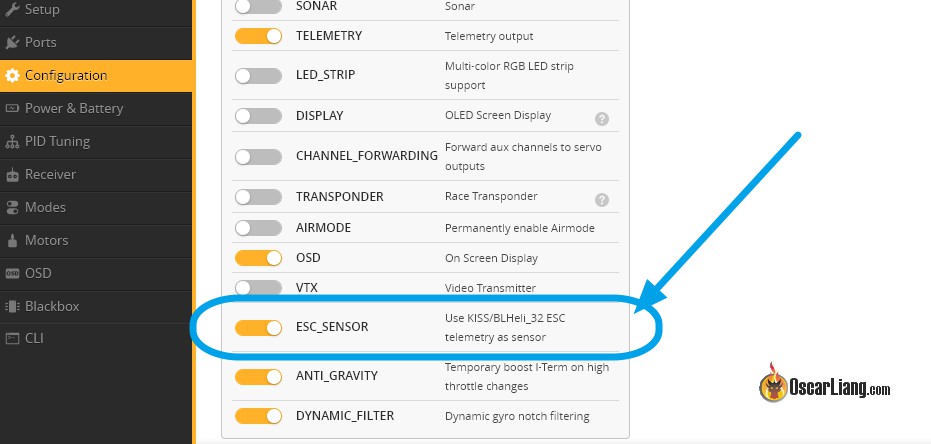
На вкладке Configuration включаем функцию «ESC_Sensor«.
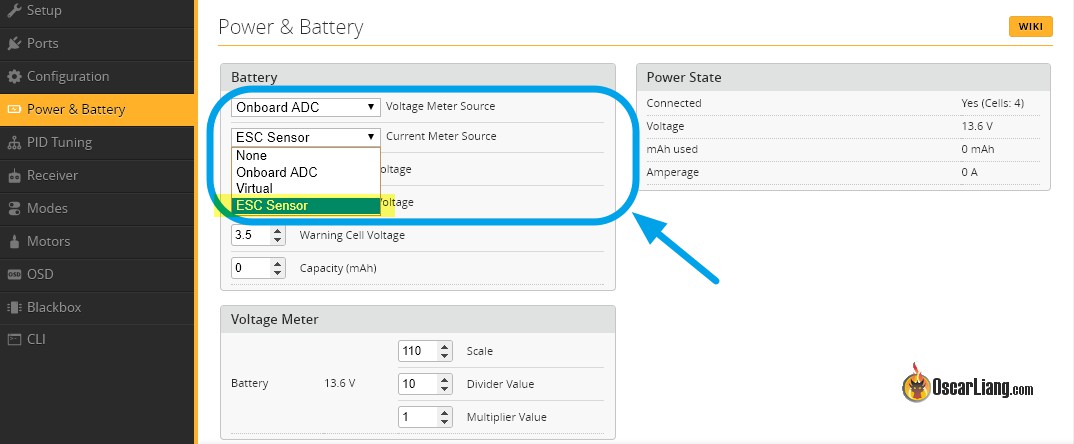
Теперь вы можете использовать телеметрию для контроля тока и напряжения (вкладка «Power & Battery» выбрав «ESC Sensor«.
Внимание! Чтобы телеметрия заработала, нужно выбрать протокол DShot (DShot150, DShot300, DShot600 или DShot1200).
Дополнительная информация: что такое DShot?
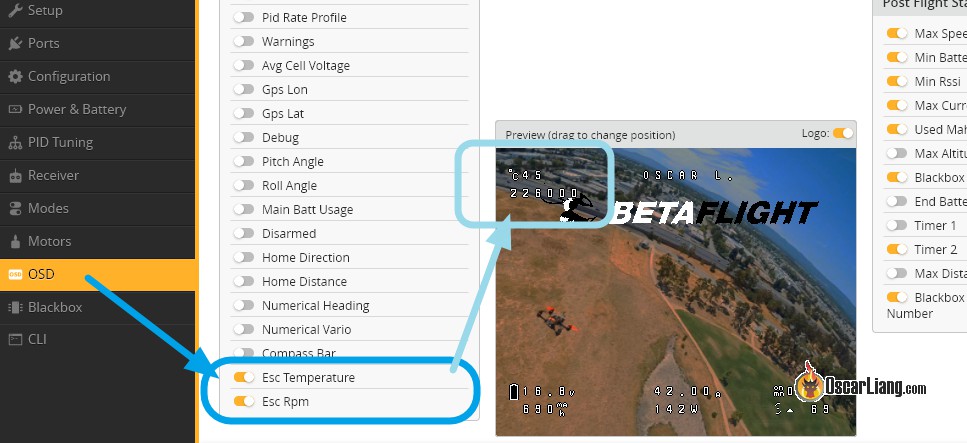
Теперь можно отобразить значения на экране, через Betaflight OSD.
На закладке OSD, включаем ESC Temperature (наибольшее значение) и «ESC RPM» (среднее значение всех моторов).
Дополнительная информация: как настроить и использовать Betaflight OSD?
Чтобы проверить, как все работает, включаем коптер, одеваем очки, армим коптер и смотрим на значение оборотов. Если оно меняется при движении стика газа, то всё хорошо (не забудьте вначале снять пропы с моторов!).
Убедитесь в точности показаний напряжения и тока, возможно понадобится откалибровать значения при помощи коэффициентов (хотя дефолтные обычно хорошо подходят).
Дополнительная информация: как откалибровать датчик тока? (англ.)
На этом всё! Буду обновлять этот пост, чтобы держать вас в курсе изменений.