В процессе настройки обычного коптера или гоночного дрона очень важно убедиться, что движения стиков вашего передатчика правильно читаются полетным контроллером. Квадрик будет летать более точно и надежно, если центральная (средняя) и конечные точки выставлены правильно.
Оригинал: How to Adjust Transmitter Channel End Point and Mid Point
В этом руководстве я покажу несколько способов настройки центральной (средней) и конечных точек в передатчике. Теоретически нужно настраивать только крен (roll), тангаж (pitch), рысканье (yaw) и газ (throttle), в большинстве случаев дополнительные каналы можно не трогать.
Проблемы, возникающие при неправильно установленной средней точке
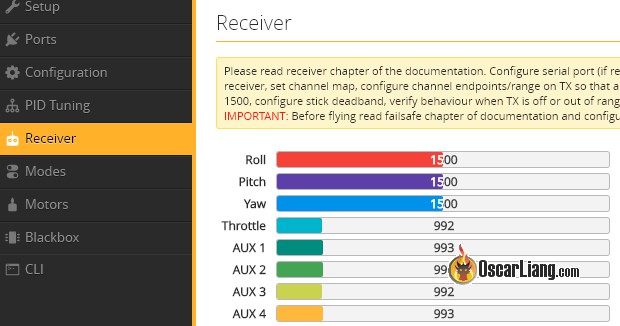
При брошенных стиках, значения крена, тангажа и рысканья должны быть 1500.
Коптер при отцентрированных стиках должен сохранять заданный угол, и двигаться только в том направлении, в котором вы укажете. Если центральные точки настроены неверно, тогда коптер будет дрейфовать в разные стороны и потребуется ручная коррекция его положения.
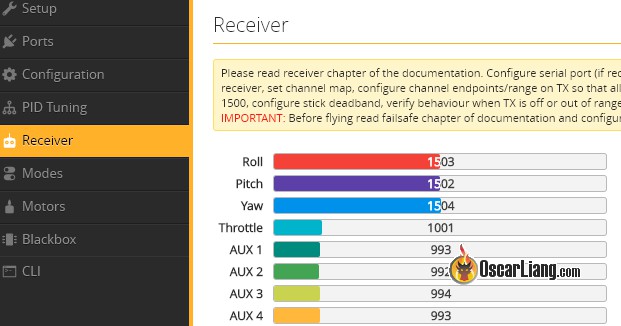
Проблемы со средней точкой по крену, тангажу и рысканью
Как настроить значение в средней точке
Следуйте одному из ниже перечисленных методов:
- Оттриммируйте стики
- Настройте значения на экране Output/Servos в Таранисе
Триммирование стиков — это, пожалуй, самый простой способ. Но, как я выяснил, он не такой точный по сравнению с тем, что я хочу предложить.
Подробнее про критерии выбора хорошей аппаратуры управления
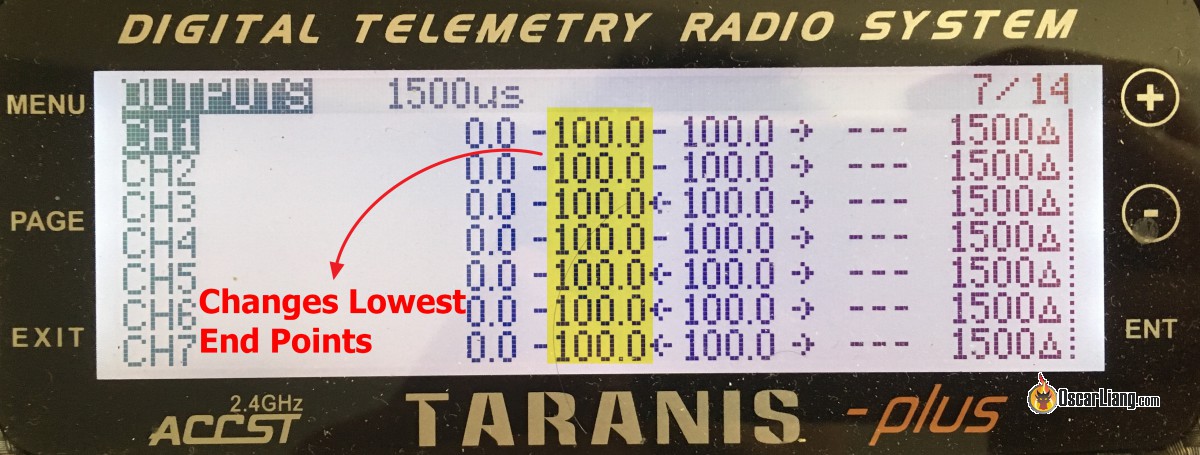
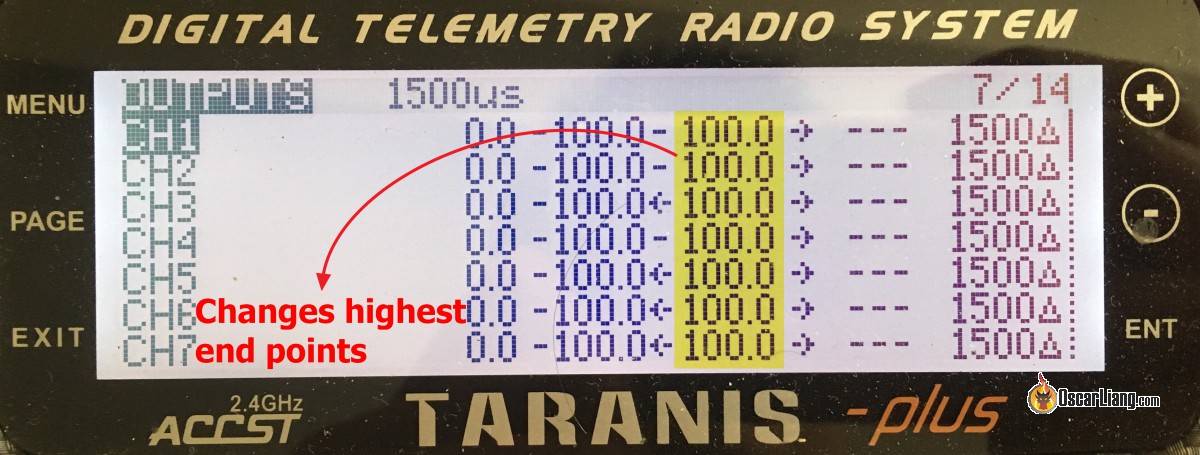
Открываем в Таранисе страницу «OUTPUTS» (или «SERVOS«, если вы используете старую версию OpenTX). Просто настраиваем значение «1500» в крайнем столбике каждого канала.
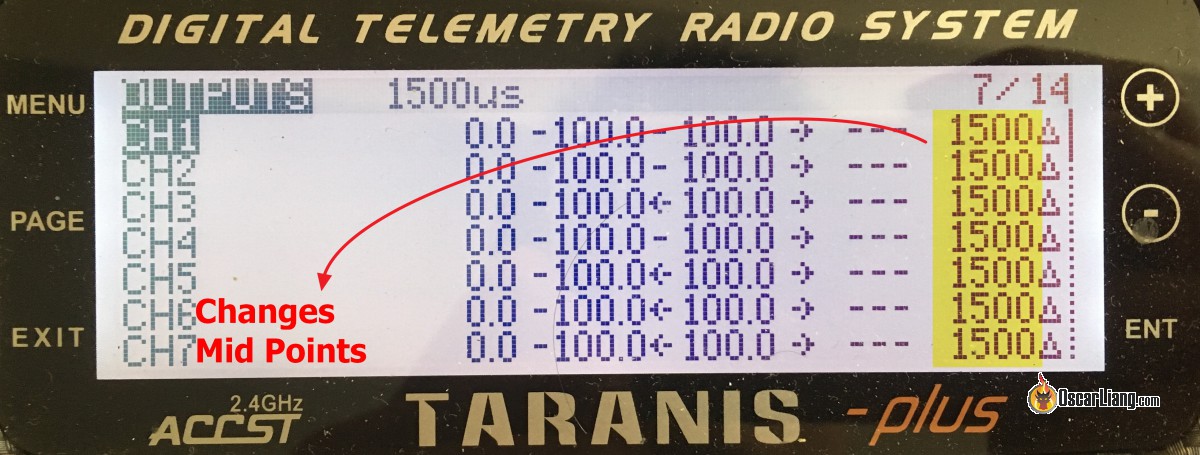
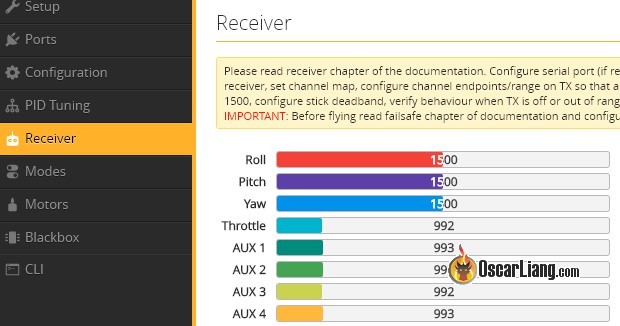
Правильное значение средней точки
Не смотрите на канал газа, он не важен.
На некоторых приемниках можно заметить джиттер (т.е. значения будут немного меняться, типа 1498 — 1502). Это нормально, но все равно нужно стараться максимально приблизить их к 1500, а затем можно задать значение «deadband» для соответствующего канала в Betaflight.
Проблемы при неправильно заданных конечных точках
Всегда нужно использовать полный диапазон работы стиков. Это значит, что минимальное значение в канале должно быть меньше 1000, а максимальное — больше 2000. Иначе квадрик может летать не так как вы предполагаете.
Для крена, тангажа и рысканья это значит, что коптер в одну сторону будет поворачиваться быстрее, чем в другую, что усложнит управление. В случае с газом, это значит, что вы не сможете использовать максимум возможностей коптера.
Могут даже возникнуть проблемы с армингом коптера, если средние и конечные точки далеки от идеальных значений. Это защитная функция во многих прошивках для коптеров.
Тестируем каналы и точки
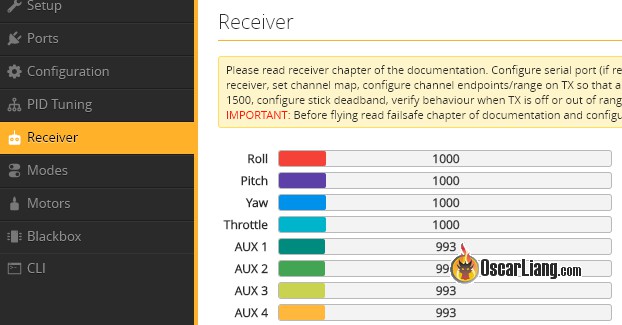
Подключаем ПК к компьютеру и запускаем Betaflight Configurator, переходим на вкладку Receiver и включаем приемник.
Двигаем стики в крайние значения: вниз-влево, смотрим на полученных значения Roll (крен), Pitch (тангаж), Yaw (рыскнье) и throttle (газ).
Проблема с минимальным значением в каналах управления
Перемещаем стики в правое верхнее положение и смотрим максимальные значения.

Проблема с максимальным значением в каналах управления
В идеальном случае, вы должны видеть значение 1000 или немного меньше, а верхнее значение должно быть 2000 (или чуть больше). Если это не так, тогда нужно настраивать каналы.
Способы настройки конечных точек
Используйте один из следующих методов:
- В Таранисе, на странице Outputs/Servos (Sub-Trim)
- Используя консольную команду RXRange в Betaflight
Outputs/Servos Sub-Trim
В Таранисе, переходим на экран OUTPUTS (SERVOS в старой версии OpenTx).
Меняем параметр MIN до тех пор, пока значение канала не станет 1000. Делаем это для всех четырех каналов: pitch, roll, yaw, и throttle.
Правильные значения нижней конечной точки
Дальше двигаем стики вправо-вверх и настраиваем параметр MAX, чтобы значения были 2000.

Правильные значения конечных точек
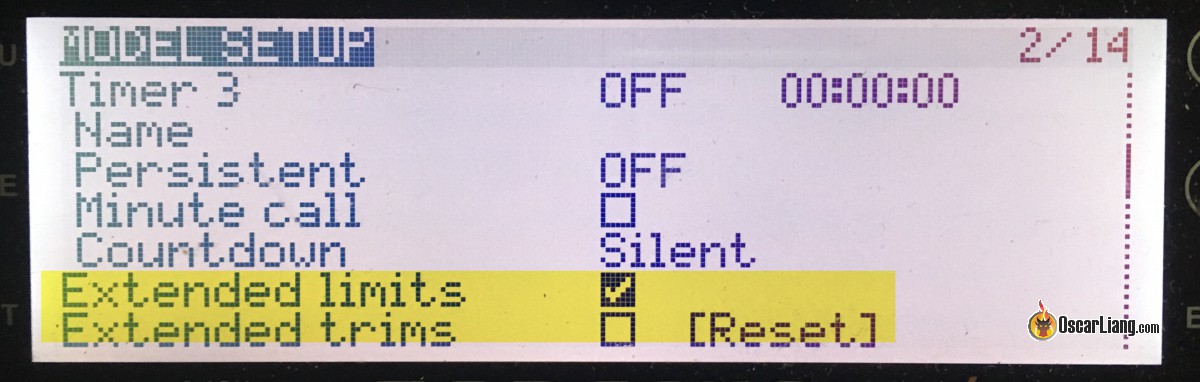
По умолчанию Таранис не позволяет установить конечные точки больше, чем 100%. Если у вас не получается выставить значения 1000 и 2000 без превышения 100%, тогда нужно включить «EXTENDED LIMITS» в настройках модели (MODEL SETUP). Но это крайнее средство, старайтесь не использовать его.
Используем RXRange для настройки конечных точек
Тем, кто не может настроить конечные точки в передатчике, или не хочет этого делать, подойдет Betaflight команда «RXRange«.
Введите «dump» в CLI (в консоли), ищем «rxrange» в результатах, должно быть 4 строки, по одной для каждого канала: Roll, Pitch, Yaw и Throttle (проверьте, что каналы идут в правильном порядке).
rxrange 0 1000 2000 rxrange 1 1000 2000 rxrange 2 1000 2000 rxrange 3 1000 2000
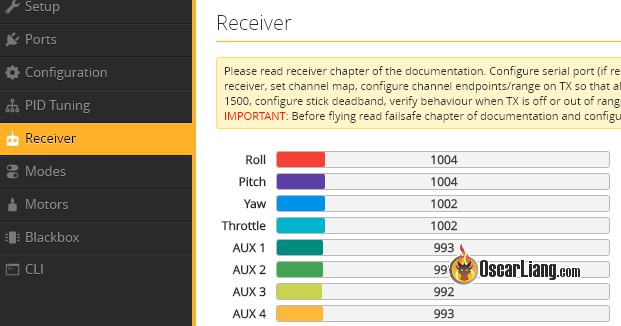
Перемещаем стики в левое нижнее положение, записываем цифры с закладки «Receiver». Также записываем цифры после перемещения стиков в верхнее правое положение.
Например, мы видим, что значения по крену 1004 – 1995. Вводим эти значения в команду «rxrange», так мы заменим дефолтный диапазон 1000-2000.
rxrange 0 1004 1995 save
Аналогично поступаем с оставшимися тремя каналами.
rxrange 1 1004 1997 rxrange 2 1004 1996 rxrange 3 1002 1999 save
Теперь все каналы будут иметь значения от 1000 до 2000. Если всё ещё есть небольшая разница, то можно её убрать, воспользовавшись первым методом (Outputs Sub trim).
Всё ещё есть проблемы?
Если у вашего Тараниса постоянно есть проблемы с конечными точками, тогда вам определенно, нужно откалибровать стики и затем повторить шаги, описанные выше. Ещё можно спросить совета на нашем форуме (англ).
Привет. Не могу коптер (Blade Torrent 110) подключить к компу, виндовс 10. Пишет: Система Windows остановила это устройство, так как оно сообщило о возникновении неполадок. (Код 43) Сбой запроса дескриптора USB-устройства. Пробовал уже на трех! компах с 10-кой.. Никак. Все процедуры, обновление драйверов, замена проводов, обесточивание и еще 100 вариантов не помогают.. Что делать? С пульта тоже настроить не могу (TBS TANGO и приемник SPEKTRUM DM9, dsm2
Вдруг поможет:
https://blog.rcdetails.info/reshenie-problem-s-drajverami-poletnyh-kontrollerov/
https://blog.rcdetails.info/poletnyj-kontroller-kirpich-kak-spasti/
Есть ли способ задать выходной сиогнал 500-2500 при входном 1000-2000?
Включите E.Limits (Extented Limits), тогда можно будет выходить за стандартные диапазоны (-100 — +100)