
Это обзор полетного контроллера Mini Revobee32 F4 и рамы Monkey X3 130.
Оригинал: Build: iFlight Mini Revobee32 F4 FC & Monkey X3 130 Frame
Характеристики
В этой сборке мы будем использовать следующие комплектующие:
- Mini Revobee32 Tower System — описание товара
- Полетный контроллер Revobee32 F4 (Betaflight OSD, ICM-20608 Gyro, 5V BEC)
- iPeaka 18A BLHeli_S 4-in-1 ESC
- Рама iFlight Monkey X3 — описание товара
- Моторы iPower the Force IF1407 4100KV — описание
Распаковка
Из-за того, что в последние пару месяцев у меня совершенно не было времени iFlight предложили прислать все в сборе, так что мне нужно было всего лишь установить приемник и протестировать коптер.
Коптер пришел в симпатичном корпусе из поролона, пропы 3045 bullnose tribades, антенна foxeer для видеопередатчика.

Взглянем поближе
Рама Monkey X3 имеет очень простой и минималистичный дизайн, к ней подходят 3″ пропы, всё это хорошо экономит вес.

Однако, есть 2 недостатка в дизайне: 1. нет возможности установить HD камеру; 2. антенну видеопередатчика легко повредить. Думаю, что видеопередатчик по типу Eachine VTX03 лучше подойдет для этой рамы.

Моторы iFlight “Force” 1407 4100KV, также выпускается версия 3500 kv, мне прислали пару запасных.

В комплекте была курсовая камера Foxeer Arrow Mini с видеопередатчиком Foxeer 200mW. Плюсы этой камеры: есть OSD для отображения напряжения аккумулятора и выдает качественную картинку. Многие комплекты микрокоптеров обычно поставляются с низкокачественными CMOS камерами, для снижения цены. Хорошо, что в iFlight не стали на этом экономить.

Не хватает одной вещи — пищалки. Вероятно, я установлю её самостоятельно для упрощения поиска при падении.

Верхняя часть рамы держится на 4 нейлоновых гайках, стойки не используются.

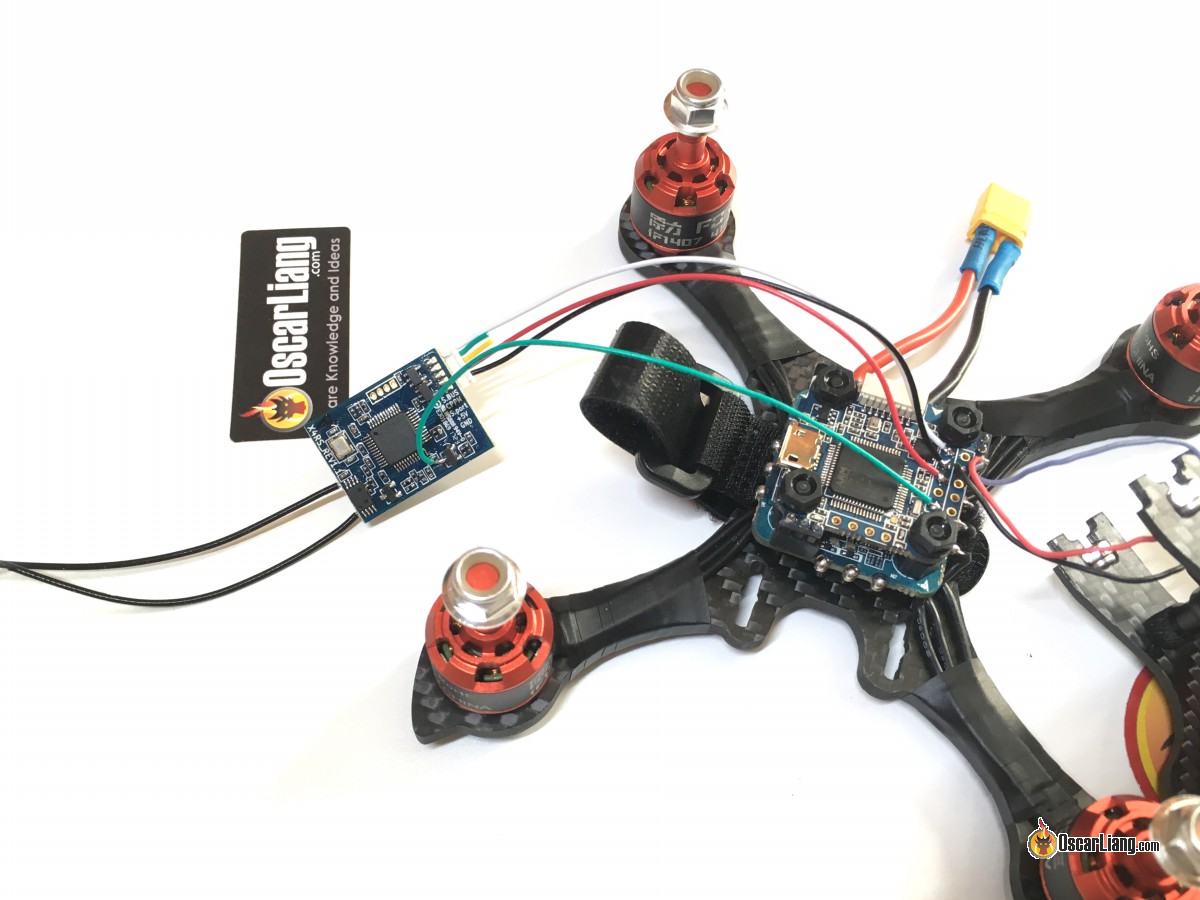
В этом коптере я использую приемник Frsky XSR. Из-за того, что ПК на F4 и не имеет встроенного инвертора для SmartPort телеметрии, мне пришлось найти «неинвертированный SPort сигнал» (зеленый провод).
Я настроил SmartPort в коптере, чтобы иметь возможность настраивать ПИДы и рейты прямо с Тараниса.
В микрокоптерах я предпочитаю регуляторы 4-в-1, это экономит место и упрощает разведение проводов.
Регуляторы и полетный контроллер уже спаяны друг с другом, это называется «tower system» (башенная система), небольшой форм-фактор — 20 на 20 мм — очень аккуратное решение для микрокоптеров. Получилась очень функциональная система, со встроенной Betaflight OSD (хотя я и не буду использовать OSD на этом коптере).
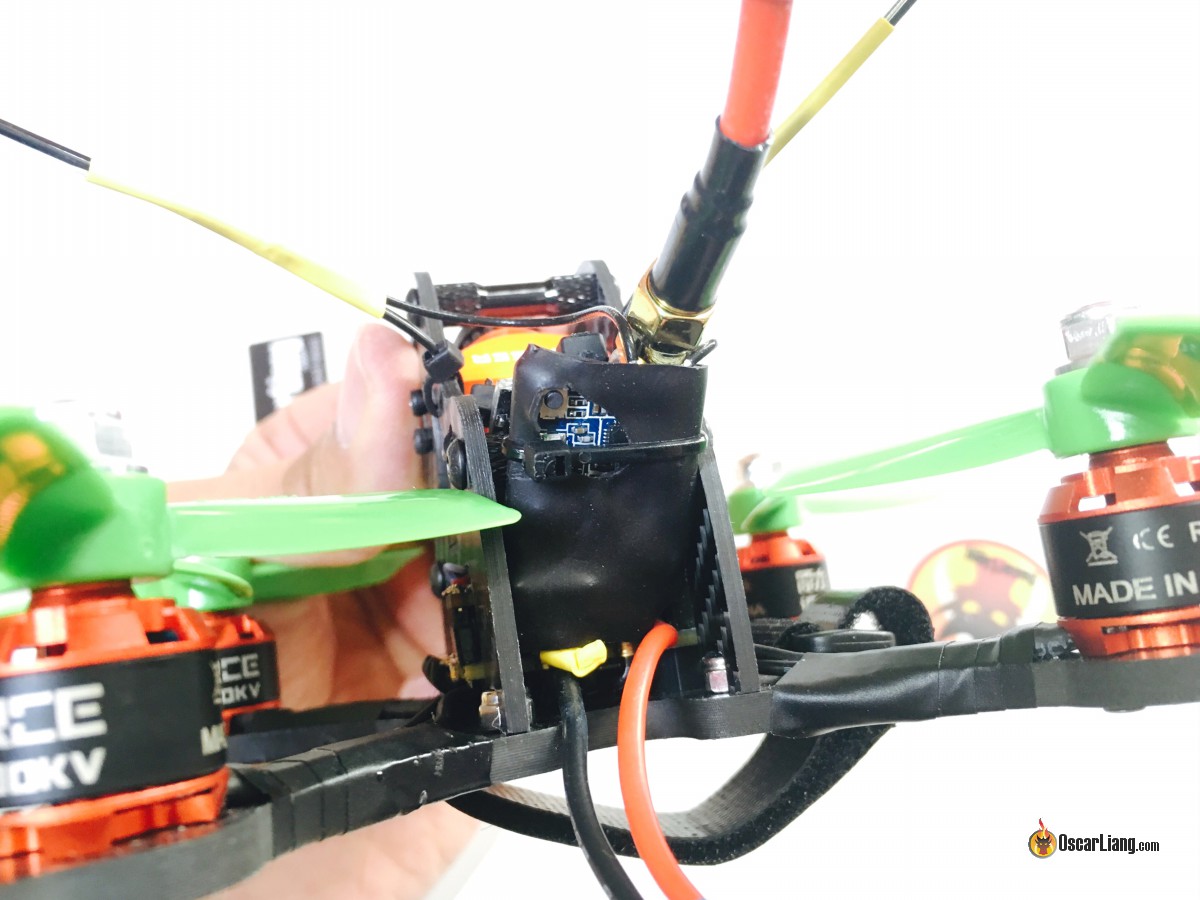
Глядя на коптер, кажется, что собрать его очень просто, однако я немного запутался, когда устанавливал приемник на эту раму. В конце концов, поставил его под видеопередатчик, и оказалось, что это идеальное место для него.
Установил пропы и антенны. Вес квадрика без аккумулятора 178 грамм. Собираюсь использовать аккумуляторы 4S 600-700 мАч.


На этом пока всё, немного позже облетаем.