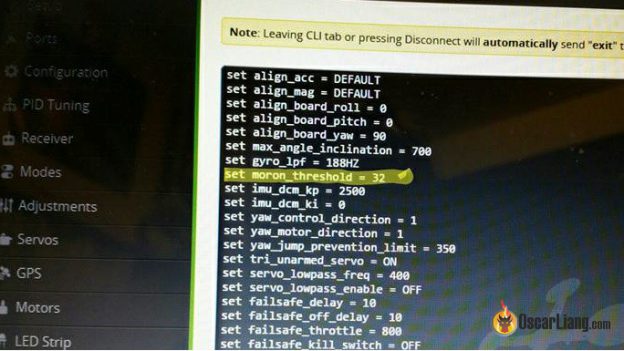
Это не шутка, в консоли Betaflight (англ.) есть параметр «уровень придурковатости» (moron_threshold). В этой статье я расскажу зачем он нужен.
Оригинал: Moron Threshold in Betaflight
Обновление, июнь 2018. В Betaflight 3.4 параметр Moron Threshold переименован в gyro_calib_noise_limit. Имя новое, но суть осталась та же.
Этот уровень нужен для того, чтобы остановить калибровку гироскопов при включении коптера, если вы слишком сильно двигаете его. Согласно википедии Betaflight (англ):
При включении питания производится калибровка показаний гироскопов. Если при этом двигать/трясти модель, то значения будут вычислены неправильно и могут ухудшиться полетные характеристики. Это пороговое значение определяет на сколько должны измениться средние показания гироскопов, прежде чем начать перекалибровку.
Тем, кто сразу после подключения аккумулятора хватает коптер и трясет его, я не говорю, что вы придурки, но советую увеличить порог в настройках 🙂
Обычным пилотам не о чем волноваться, просто оставьте дефолтные настройки.
Были слухи, что в будущих версиях Betaflight этот параметр переименуют. Надеюсь это не так!
Происхождение уровня придурковатости
Уровень придурковатости можно отследить вплоть до Baseflight. Это один из немногих параметров, которые до сих пор не переименовали в Cleanflight и Betaflight.
Очевидно, что те, кто давно увлекается нашим хобби, знают кто такой Timecop (автор Baseflight, прим. перев). Только он может придумать такое прикольное имя 🙂 В любом случае мне нравится эта шутка. Я всегда улыбаюсь, когда проглядываю все 500 строк конфига в консоли.