
В этом руководстве вы найдете основную информацию о видах моторов для коптеров, особенностях их конструкции; описание всего того, что влияет на летные характеристики и эффективность. Это поможет вам выбрать оптимальные моторы для следующего коптера.
Оригинал: How to choose Motor for Racing Drone & Quadcopter
Содержание
- Основа всего: вес коптера VS тяга моторов
- Размеры моторов
- KV
- Крутящий момент
- Схема крепления
- N и P в «формуле» мотора (полюса и магниты)
- Обмотка
- Размер рамы => Диаметр пропеллеров => Размер мотора
- Основные факторы влияющие на летные характеристики
- Прочие факторы влияющие на летные характеристики
- Особенности моторов для квадрокоптеров
- Моторы прямого и обратного вращения (CW и CCW)
- Балансировка моторов
- Рекомендации по выбору
Ищите моторы? С чего начать?
Не важно какого размера будет у вас коптер, перед выбором моторов нужно определиться с рамой и знать примерный вес коптера. Однако, если вы планируете собирать 5″ коптер, тогда можете смело переходить к разделу «размер мотора«.
Если вы новичок, тогда рекомендую начать со статьи про то, что такое FPV гонки.
Есть два вида моторов: коллекторные и бесколлекторные. Как правило бесколлекторные используются на более крупных моделях, а коллекторные только на очень мелких. Позже я опубликую статью с более подробным описанием их отличий.
Размер рамы и вес
Общий вес коптера — это вес всех комплектующих, которые планируется поставить на модель: рама, полётные контроллер (ПК), плата распределения питания (PDB), приёмник, видеопередатчик, антенна, моторы, пропеллеры, регуляторы скорости, LiPo аккумулятор, дополнительная нагрузка типа GoPro и т.д.
Скорее всего вы не получите точный вес, лучше его переоценить и иметь запас по мощности, чем недооценить и получить нелетающий коптер. Не забудьте добавить 10-20 грамм для учета веса проводов, пищалки, нейлоновых стяжек и т.д.
Зная размер рамы, мы получаем максимально допустимый диаметр пропеллеров. Как только вы узнаете вес коптера, то сможете оценить необходимую тягу, и комбинацию мотор-проп (винтомоторная группа).
Дополнительная информация: как выбрать пропеллер для коптера (англ).
Соотношение тяги и веса коптера
Общее правило такое: макс. тяга должна быть как минимум в 2 раза больше веса коптера. Запомните, это действительно минимум необходимый для того, чтобы коптером можно было легко управлять во время висения. Если тяга слишком маленькая, тогда коптер будет плохо слушаться управления, и, возможно, будет довольно сложно взлететь.
Например, если вес коптера 1 кг, тогда тяга всех моторов при 100% газе, должна быть как минимум 2 кг (500 г на мотор). Конечно, хорошо, если тяга ещё выше…
Чтобы летать быстро, у гоночных коптеров соотношение тяги к весу значительно больше. Нет ничего необычного в том, что у кого-то миникоптер имеет это соотношение 10:1 или даже 13:1. В общем и целом, для акробатики я рекомендую иметь соотношение как минимум 5 к 1.
Чем больше это число, тем лучше управляется и ускоряется коптер. Однако, если оно слишком большое, тогда коптером становится сложно управлять. Небольшого движения стика газа будет достаточно чтобы «выстрелить коптером на орбиту, как ракетой». 🙂 Конечно, всё очень сильно зависит от навыков пилота.
Даже если вы планируете заниматься только медленной аэрофотосъемкой, нужно рассчитывать на 3:1 или 4:1. Это даст вам не только надежное управление, но и позволит в будущем увеличить полезную нагрузку. Например, более тяжелую камеру или дополнительные аккумуляторы для увеличения длительности полёта. Если вы хотите заняться гонками, то ограничений на это соотношение нет 🙂 выбирайте на столько большое значение, на сколько вам будет удобно управлять!
Размеры моторов
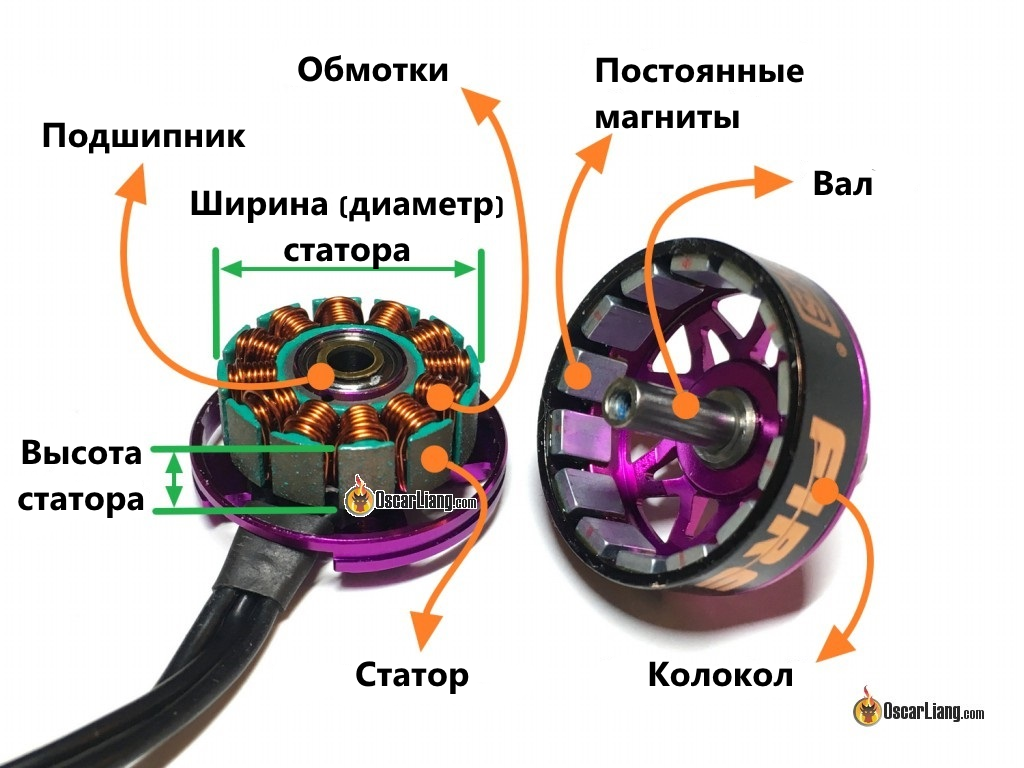
Размер бесколлекторного моторы обычно обозначается 4 цифрами: AABB, где «АА» — это диаметр статора (stator width / stator diameter), а «BB» — высота статора (stator height), оба значения в миллиметрах.
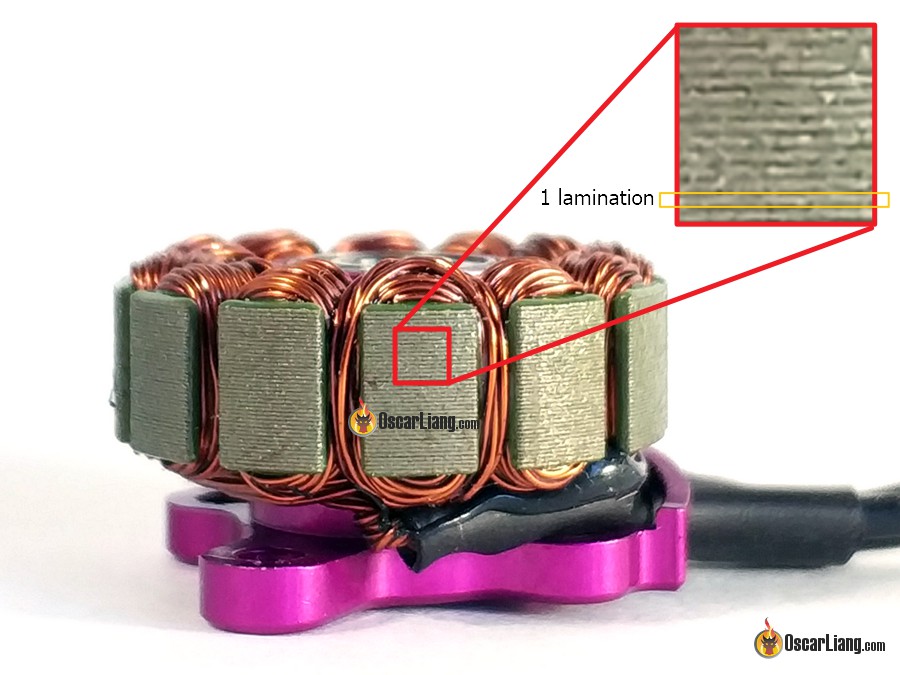
Что такое статор (stator) у бесколлекторного мотора? Статор — это стационарная (неподвижная) часть мотора, у нее есть полюса (poles), на которые намотан медный провод (обмотка). «Полюса» (по сути, сердечник) сделаны из тонких металлических пластин собранных в стопку, между ними тонкий слой диэлектрика.
- Чем «выше» статор, тем больше мощность на больших оборотах
- Чем «шире» статор, тем больше крутящий момент при низких оборотах
Увеличение диаметра и высоты мотора требует увеличения как обмоток (электромагнитов), так и постоянных магнитов. Разница в том, что при увеличении высоты статора размеры постоянных магнитов увеличиваются сильнее, чем катушки; а при увеличении диаметра статора обмотки увеличиваются сильнее, чем магниты.
Размеры пропеллеров совместимых с мотором определяются диаметром вала. Валы моторов для 3″, 4″, 5″ и 6″ пропов имеют резьбу M5 (т.е. диаметр 5 мм). У современных моторов вал встроен в сам колокол, для более ранних моторов нужно было использовать адаптер (англ).
На 5″ коптерах чаще всего применяются моторы размера 2204, 2205, 2206, 2207, 2305, 2306, 2307, 2407.
Высокий или широкий статор?
У более высокого статора больше «площадь поверхности» (обращенной к магнитам) следовательно через него проходит «больше» магнитных полей. Большая площадь также способствует хорошему охлаждению. Высокие моторы дают большую мощность и имеют высокие обороты.
Чем больше диаметр статора, тем больший объем железа и меди в нём, в результате мы получаем мотор с большим крутящим моментом, а также более эффективный мотор.
KV
«KV» — это количество оборотов в минуту (RPM) на единицу напряжения (более правильное определение KV, англ).
Это очень важный параметр бесколлекторных моторов, он показывает на сколько увеличатся обороты мотора (RPM) при увеличении напряжения на 1 вольт, при отсутствии нагрузки на валу (без пропа). Например, если подключить мотор 2300 KV к аккумулятору 3S LiPo (12,6 вольт), тогда без пропеллера он будет вращаться со скоростью 28980 оборотов в минуту (2300 * 12,6). Обычно это примерное значение, указываемое производителем.
Как только вы поставите пропеллер, обороты снизятся из-за сопротивления воздуха. Моторы с более высоким KV будут стараться раскрутить проп быстрее, но могут потреблять большой ток. Именно поэтому мы обычно ставим большие пропы на моторы с небольшим KV, а мелкие и легкие пропы отлично подходят для моторов с высоким значением KV.
Значение KV определяется числом витков обмоток статора. Обычно увеличение числа витков уменьшает KV мотора, а уменьшение числа витков — увеличивает KV.
Сила магнитов тоже влияет на KV, чем они сильнее, тем больше KV
Если установить очень большой пропеллер на мотор с большим KV, тогда он попробует раскручивать его также быстро, как будто это маленький проп, но для этого требуется гораздо большее усилие. А чтобы получить требуемое усилие, мотор начнет потреблять гораздо больший ток, а следовательно выделять больше тепла. Что ведет к его перегреву, и может повредить мотор. При перегреве мотора изоляция в обмотках сгорает и получается короткое замыкание.
Общее правило: чем тяжелее коптер, тем ниже KV его моторов, на мелких коптерах обычно используются моторы с очень большим KV
Крутящий момент
Иногда говорят, что у моторов с небольшим KV высокий крутящий момент, а если у мотора высокое значение оборотов на вольт, то крутящий момент небольшой. Хотя это и возможно, но не всегда правда. KV почти ничего не говорит о крутящем моменте, а влияет на максимальный потребляемый ток и макс. допустимое напряжение.
Как уже указывалось выше, у моторов с высоким KV обмотки короче, а значит и ниже сопротивление. Это снижает макс. допустимое напряжение и увеличивает потребляемый ток (при прочих равных характеристиках, при том же пропеллере).
Крутящий момент в основном определяется:
- размером статора, чем он больше, тем выше момент
- материалами: тип магнитов, качество медной обмотки
- конструкцией мотора: расстояние между ротором и статором, числом полюсов и т.д.
Если всё одинаково, тогда два мотора с разным KV будут иметь одинаковый крутящий момент. Небольшое значение KV просто означает, что вам нужно более высокое напряжение чтобы получить те же обороты. На самом деле все несколько сложнее, но это довольно простое и точное описание.
Причина, по которой пилотам кажется, что у моторов с небольшим KV большой момент, в том, что падение напряжения у таких моторов ниже, чем у моторов с высоким KV, именно это падение напряжения и снижает крутящий момент. Теоретически, момент должен быть одинаков, но на практике такого не бывает.
Крутящий момент — это палка о двух концах.
Моторы с большим крутящим моментом позволяют менять обороты быстрее, благодаря этому будет меньше паразитных вибраций, а реакция на стики — мгновенной. Коптер с такими моторами будет очень резким, а его движения будут менее естественными, более похожими на дерганые движения роботов. В противном случае коптер ощущается более плавным. Выбор зависит от вашего стиля, личных предпочтений, высокий крутящий момент — это не всегда хорошо.
В наши дни всё больше и больше пилотов сталкивается с паразитными вибрациями, и корнем проблемы могут быть как раз современные, сверхмощные моторы. Они настолько мощные, что могут создавать петли обратной связи, от которых очень трудно избавиться. Демпфирование полетного контроллера может помочь, но лучше искать настоящую причину вибраций и не использовать чрезмерно мощные моторы.
Схема крепления
Обычные схемы крепления (расстояние между отверстиями) моторов 22xx, 23xx и 24xx: 16 х 16 мм или 16 х 19 мм. Большинство рам для 5″ коптеров рассчитано именно на это.

N и P в «формуле» мотора (полюса и магниты)
Вы, наверное, уже видели в описаниях моторов значения типа «12N14P». Число перед «N» (12) означает количество электромагнитов в статоре, а «14P» — количество постоянных магнитов в роторе (в колоколе).

У разных типоразмеров моторов разное числю полюсов, например, моторы типа 22XX и 23XX обычно имеют 12 полюсов (12N) и 14 магнитов (14P).
Количество полюсов определяет расстояние между ними, если их мало, тогда в статоре поместится больше железа, поэтому мощность будет выше. Если мы увеличим количество полюсов, тогда магнитное поле будет более равномерным, и, следовательно, мотор будет вращаться более плавно, т.к. управление будет более точным.
- Больше полюсов — плавность
- Меньше полюсов — выше мощность
Количество полюсов всегда кратно трем, т.к. по сути, это 3х-фазный мотор и имеет 3 провода, поэтому число будет 9, 12, 15, 18 и т.д. Число полюсов сложно изменить и при выборе двигателя для коптера на это можно не обращать внимание.
Обмотка
Число витков в обмотках статора влияет на то, какой максимальный ток будет потреблять мотор, а толщина провода определяет максимально допустимый ток, который не вызовет перегрев мотора.
Меньше витков = меньше сопротивление = выше kv. Недостаток — магнитное поле статора будет слабее, а усилие на валу — меньше.
Все происходит наоборот при увеличении числа витков. Чем больше витков, тем сильнее магнитное поле статора и больше усилие. Но из-за более длинных проводов увеличивается сопротивление и KV мотора уменьшается.
Чтобы получить большую мощность моторов, производители часто увеличивают число полюсов и при этом используют более толстый провод. Благодаря этому сопротивление обмоток уменьшается, а мощность увеличивается (не жертвуя при этом эффективностью и крутящим моментом). Такой мотор без перегрева может потреблять довольно большой ток.
Однако более толстый провод и увеличение числа обмоток приводят к увеличению массы мотора, а обмотки занимают больше места, что требует увеличения статора. Поэтому и появляются всё более крупные моторы, и по вышеуказанным причинам они мощнее.
Одножильные и многожильные обмотки
Одножильная обмотка делается толстым проводом и способна хорошо рассеивать тепло, больше подходит для моторов с большим напряжением питания, типа 5S или 6S. Но, из-за значительных пустот между толстыми витками, плотность обмотки довольно низкая.
Для замены одного толстого провода, в многожильной намотке обычно используют по три более тонких. Т.к. провода тоньше, то теплоотвод хуже, и физически их легче повредить.
Обычно у моторов с многожильной намоткой характеристики лучше, чем с одножильной, это связано с тем, что такая намотка получается плотнее, что дает более сильное магнитное поле (т.е. получается более мощный и эффективный мотор).
Замечу, что ещё очень важна аккуратность намотки, не только в эстетическом плане, но и в электромагнитном. Если провод уложен как попало, есть куча пересечений, тогда провода не будут перпендикулярны статору и магнитное поле будет менее эффективным.
Подшипники
О подшипниках обычно мало говорят, это связано с тем, что про них мало что известно, но я думаю, что должен дать кое-какую базовую информацию.
Размер подшипника это не внешний или внутренний диаметр, это разница между ними. Чем он шире, тем больше шариков помещается. Более крупные шарики прочнее, а значит надежнее в случае аварии. Если шарики меньше, тогда вращение будет более плавным на больших оборотах.
Возможно, вы слышали, что в некоторых моторах используют «керамические подшипники»? В них ставятся керамические шарики, а не металлические; такие подшипники более плавные, но и более хрупкие.
Диаметр отверстия в подшипнике (внутренний диаметр) определяется диаметром вала двигателя.
Какого размера нужен мотор?
Выбирать комплектующие для коптера можно в таком порядке: размер рамы, размер пропов, размер мотора.
Зная размер рамы, мы можем оценить требуемые размеры моторов. Рама ограничивает нас макс. допустимым диаметром пропов, а от характеристик пропеллера зависят характеристики моторов (чтобы эффективность их работы была максимальной), именно тут мы и определяемся с KV моторов.
Также необходимо убедиться, что у моторов достаточная мощность для вращения выбранных пропов, тут уже играет важную роль размер статора. Обычно чем больше статор, и выше KV, тем больший ток потребляет мотор.
В таблице вы найдёте общие рекомендации, это не жесткие правила, одни используют более оборотистые моторы, чем указано; другие, наоборот, менее оборотистые.
Данные предполагают, что на квадрике будет стоять 4S LiPo аккумулятор, а размер рамы — это расстояние между диагонально расположенными моторами (подробнее про рамы читайте тут).
| Размер рамы | Диаметр пропеллера | Размер мотора | KV |
| 150 или меньше | 3″ или меньше | 1105 -1306 или меньше | 3000KV или больше |
| 180 мм | 4″ | 1806 | 2600KV – 3000KV |
| 210 мм | 5″ | 2204-2208, 2306 | 2300KV-2600KV |
| 250 мм | 6″ | 2204-2208, 2306 | 2000KV-2300KV |
| 350 мм | 7″ | 2208 | 1600KV |
| 450 мм | 8″, 9″, 10″ или крупнее | 2212 или больше | 1000KV и ниже |
Напряжение и потребляемый ток
Важно понять, что напряжение питания тоже влияет на выбор моторов и винтов. При увеличении напряжения мотор будет пытаться вращать винт быстрее, и поэтому будет потреблять большой ток. Убедитесь, что знаете, какой будет потребляемый ток и какая получится тяга.
После того, как вы определите макс. потребляемый ток, пора переходить к выбору регуляторов скорости.
Основные факторы влияющие на летные характеристики
Определившись с размером мотора, вы увидите, что подходящих моделей очень много. Чтобы выбрать наилучший вариант, нужно учесть несколько моментов:
- Тяга
- Эффективность и потребляемый ток
- Вес
Выбор того или иного мотора очень сильно зависит от целей применения коптера, стиля полета и желаемого поведения.
Тяга
Пожалуй, это первое, на что обращают внимание при выборе мотора.
Чем выше тяга, тем больше будет ускорение, но при этом может заметно увеличиться потребляемый ток или упасть энергоэффективность. Не перенагружайте аккумуляторы сильно жрущими винтомоторными группами.
Если коптер потребляет очень большой ток при максимальном газе, тогда у аккумулятора должен быть соответствующий допустимый разрядный ток (англ). Не забывайте и про емкость аккумулятора, она должна быть достаточной чтобы летать продолжительное время.
Тяга — важный, но не единственный критерий выбора мотора.
Вес мотора
При выборе мотора часто упускают из вида его вес, хотя это очень важный критерий для фристайла и дронрейсинга.
Поскольку моторы расположены по углам рамы, их вес заметно влияет на отзывчивость управления коптером. Более тяжелые моторы увеличивают угловой момент инерции коптера, т.е. чтобы поменять положение коптера потребуется большее усилие.
На практике это означает, что при выполнении флипов и ролов требуется время чтобы коптер набрал необходимую скорость вращения, а затем время, чтобы снизить эту скорость. Более тяжелые моторы требуют больше времени на изменение скорости. Поэтому коптер с тяжелыми моторами будет менее отзывчивым.
Эффективность и потребляемый ток
Эффективность мотора обычно вычисляется делением тяги (при 100% газе) на потребляемую мощность и измеряется в граммах на ватт (г/Вт). Чем больше число, тем эффективнее мотор.
При выборе мотора нужно смотреть на его эффективность во всем диапазоне мощностей, не только на максимуме. Некоторые моторы лучше всего работают при небольшом газе, и могут терять эффективность при его увеличении.
Ещё один способ оценки эффективности — «грамм на ампер» (тяга/ток).
Обычно, чем больше тяга, тем больше потребляемый ток, поэтому нужно отдавать предпочтение моторам с макс. тягой при минимальном токе. Неэффективные моторы либо дают небольшую тягу, либо потребляют очень много.
Эффективность зависит и от винтов, главное найти компромисс между тягой и эффективностью.
Прочие факторы влияющие на летные характеристики
Производители не указывают многие характеристики, но их можно найти, почитав обзоры и тесты.
- Крутящий момент
- Время реакции
- Температура
- Уровень вибраций и качество балансировки
Крутящий момент
Это сила, которая вращает пропеллер, она определяет скорость, с которой мотор может изменить обороты (RPM). Другими словами, на сколько просто мотору проворачивать массу ротора, винта и, что более важно, воздуха.
Крутящий момент влияет на характеристики коптера, особенно на точность и отзывчивость управления. У мотора с большим крутящим моментом более быстрая реакция, т.к. он может быстрее поменять скорость вращения (RPM). Возможно даже будет меньше проявляться пропвош (propwash — тряска коптера, когда он движется в турбулентном потоке, например при флипах, резких разворотах и т.д.).
Большой крутящий момент позволит использовать более тяжелые винты (ценой увеличения потребляемого тока). Если на мотор с небольшим крутящим моментом поставить слишком тяжелый проп, тогда ему не хватит «сил» вращать его с нормальной скоростью, в результате будет низкая эффективность работы и перегрев мотора.
Недостаток моторов с высоким крутящим моментом — колебания/вибрации. Такой мотор может менять обороты очень быстро, в результате ошибка в PID регуляторе может усиливаться и накапливаться (англ), что вызовет колебания всего коптера, от которых будет сложно избавиться настройкой ПИД коэффициентов, особенно по курсу.
Время реакции
Это время зависит от крутящего момента, чем он выше, тем быстрее реакция. Простой способ измерения — засечь за какое время мотор наберёт макс. обороты.
Время реакции сильно зависит от веса и шага выбранного пропеллера. Помните, атмосфера тут тоже имеет влияние. На уровне моря давление выше, воздух плотнее, т.е. больше молекул воздуха, которые перемещаются винтом для создания тяги. На большой высоте винты будут вращаться быстрее и время реакции на стики будет ниже, но общая тяга тоже снизится (т.к. плотность воздуха ниже).
Температура
Она тоже влияет на моторы, т.к. при большой температуре снижается сила магнитного поля постоянных магнитов ротора, а при очень большой температуре они быстро размагничиваются, что снижает срок службы моторов.
Использование слишком тяжелых пропов и постоянная эксплуатация на больших оборотах может привести к перегреву. Постоянный перегрев ухудшит характеристики магнитов и поэтому конструкция моторов, обеспечивающая хорошее охлаждение, также гарантирует большой срок эксплуатации (конечно если вы не будете падать и ломать моторы).
Уровень вибраций и качество балансировки
Вибрации моторов могут вызвать кучу разных нежелательных побочных эффектов, и скажутся на летных характеристиках коптера.
Если мотор плохо отбалансирован, тогда вибрации могут влиять на PID-контроллер. Такой коптер будет довольно сложно настроить, т.к. частота вибраций зависит от газа.
Плохо отбалансированный мотор генерирует гораздо больше электрического шума, по сравнению с плавно вращающимся. Такие помехи тоже влияют на гироскопы, что снижает возможности коптера ещё больше, а также создают шумы на видео (если FPV оборудование питается от того же аккумулятора, что и моторы, а так бывает в 99% случаев, прим. перев).
Многие пилоты используют демпферы и антивибрационное крепление моторов и полётного контроллера, это позволяет снизить уровень вибраций и дает неплохие результаты.
Помните, что поврежденный, погнутый или несбалансированный пропеллер также создает нежелательные вибрации.
Особенности моторов для квадрокоптеров
Очень много параметров влияют на характеристики мотора, они могут быть очень сложными и противоречивыми. Например, моторы с одинаковым размером статора и KV, могут давать совершенно разную тягу, потреблять разный ток и по-разному реагировать на стики, всё это даже при использовании одинаковых пропеллеров. Отличия в дизайне, материалах, это тоже важно.
Ниже я покажу вам разные конструктивные особенности, которые влияют на основные характеристики моторов.
Вал
Конструкция вала постоянно меняется. Раньше это был алюминиевый пруток, затем производители стали делать вал полым, а вместо алюминия стал использоваться титан. Вес примерно такой же, но вал получился жёстче и прочнее. Однако, сверление отверстия строго по центру титанового вала заметно увеличило стоимость производства.
В последнее время всё чаще используется другой вариант: стальной штырь внутри трубки.

Магниты в бесколлекторных моторах
Магниты различаются по силе магнитного поля, например: N52, N54 и т.д. Чем больше число, тем сильнее магнит.
Более сильные магниты теоретически дадут больший крутящий момент и высокую эффективность.
При повороте мотора руками вы почувствуете «щелчки» или «шаги», чем отчетливее они ощущаются, тем хуже, т.к. это показывает силу магнитного поля и то, на сколько она слабая между магнитами, т.к. поле очень неравномерно. Если «щелчки» более слабые, то мотор будет вращаться плавнее.
При определенной температуре магниты ослабевают, N52H нужны чтобы справиться с высокой температурой. Буква H в конце, означает высокую рабочую температуру. Говорят, что N52SH в этом плане ещё лучше, но в настоящее время не известно на сколько N52SH лучше N52H и N52.
Есть вероятность, что при аварии или от вибрации магниты вообще оторвутся. Их можно приклеить обратно клеем Loctit 438.
Толщина пластин статора (lamination)
Статор собирается из отдельных пластин, чем меньше толщина пластины, тем больше их требуется для сборки статора.
Если кратко, то чем тоньше пластины, тем лучше. Сборный статор позволяет снизить вихревые токи (токи Фуко), из-за которых меняется магнитное поле и выделяется лишнее тепло. Тем тоньше пластины, тем меньше энергии тратится на вихревые токи (из-за которых появляются нежелательные магнитные поля), а мотор получается более эффективным и мощным.
Воздушный зазор (air gap)
Воздушный зазор между ротором и статором. С увеличением расстояния магнитное поле ослабевает нелинейно, так что уменьшение этого зазора заметно увеличивает мощность мотора.
Небольшой зазор не только делает мотор более мощным, но и увеличивает крутящий момент и уменьшает время реакции. Недостаток небольшого зазора: увеличение потребляемого тока и уменьшение эффективности. Ну и появляются опасения на счет долговечности, т.к. при ударе по колоколу, может сместится ротор, который заденет статор, в результате чего магниты могут отвалиться или вообще разрушиться.
Форма магнитов — изогнутые магниты
Использование изогнутых магнитов, позволяет уменьшить расстояние до статора, т.к. зазор становится одинаковым по всей длине магнитов.
Фактически это означает, что точка с самым сильным магнитным полем теперь находится не на поверхности магнита (как у прямоугольных).
«Эпицентр» магнитного поля с внешней стороны будет ниже поверхности, а с внутренней стороны — над поверхностью. Т,е. получается что магнитные поля постоянных магнитов и электромагнитов сближаются без уменьшения воздушного зазора.
Помимо формы магнитов, некоторые производители экспериментируют с их толщиной, иногда более тонкие магниты (с более слабым магнитным полем) дают лучший результат.
Стопорное кольца / стопорный винт
Чтобы зафиксировать вал на основании мотора, производители используют либо стопорное кольцо, либо винт. У каждого способа есть как достоинства, так и недостатки, сложно сказать, что лучше.
Крепление вала стопорным кольцом и винтом
В общем и целом, использование винтика упрощает обслуживание мотора, т.к. его легче открутить, чем снять и поставить стопорное кольцо. При использовании винта есть риск перетянуть его и тогда вал будет вращаться с доп. усилием.
Были и случаи отстрела стопорных колец прямо во время полета, при этом колокол сразу улетает в сторону, а коптер падает. Однако, и с винтами такое тоже случается.
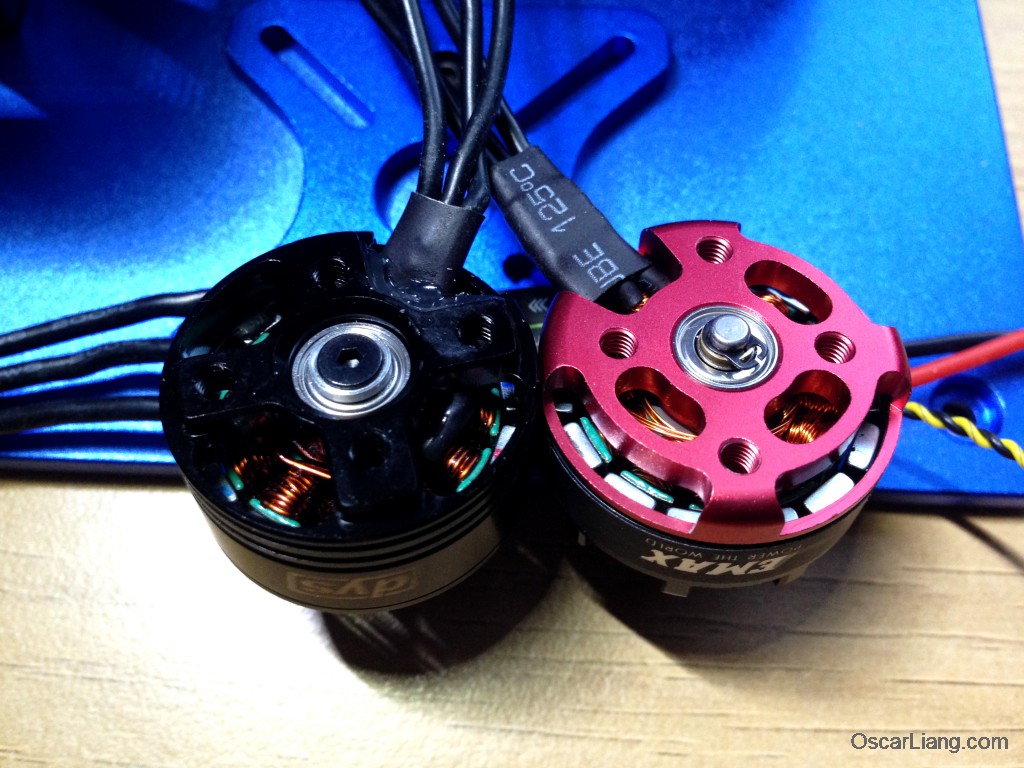
Открытый или закрытый низ мотора?
Нижняя часть мотора (основание) может быть сделана в «традиционном», закрытом стиле или в более новом, открытом. У обоих вариантов есть и плюсы, и минусы.

Открытый низ мотора

Закрытый низ мотора
У моторов с закрытым низом более прочное основание, однако если низ открытый, то и вес меньше, разница около 2 грамм.
В мотор с закрытым низом реже попадает грязь, но открытые моторы легче чистить.
Если низ открытый, то хорошо видны крепежные винты, поэтому шанс закоротить обмотки ниже (чаще всего коротят обмотки новички, если у моторов закрытый низ).

В мотор с открытым низом легко попадает грязь, но такие моторы легче чистить
Однако, закрытый низ лучше защищает обмотки от повреждения.
Форма кольца для фиксации магнитов
Внутри колокола есть кольцо для фиксации магнитов. Сам колокол обычно изготавливают из алюминия, а кольцо — из стали, т.к. оно должно взаимодействовать с магнитным полем.
В современных моторах это не просто кольцо, его форма специально разрабатывается для оптимизации магнитного поля и увеличения крутящего момента.
«PoPo» — способ крепления пропеллеров
«Pop on Pop off» (PoPo) — это вал, в котором есть подпружиненные шарики для быстрой установки пропеллера. Более подробно читайте тут (англ).

Прочие фишки
- Контактные площадки для пайки
- Интегрированные регуляторы скорости
- Дизайн системы охлаждения
Производители моторов постоянно экспериментируют как с дизайном, так и с интеграцией с другим железом, это ведет к улучшению системы охлаждения и даже интеграции регуляторов в моторы. Лично я считаю, что контактные площадки для пайки проводов питания довольно удобны, они позволят вам использовать более тонкий провод там, где не нужны большие токи, а значит сэкономят вес. В случае обрыва провода ремонт тоже упрощается.
Моторы прямого и обратного вращения (CW и CCW)
Иногда можно встретить маркировку «CW» и «CCW«, что расшифровывается как “ClockWise” (по часовой стрелке) и “Counter-ClockWise” (против часовой стрелки).
Направление вращения важно для коллекторных моторов, т.к. щетки очень быстро стираются при вращении в обратную сторону, у бесколлекторных моторов такой проблемы нет.
CW и CCW бесколлекторные моторы это как правило полностью одинаковые моторы, единственное их отличие — направление резьбы на валу (англ).
Моторы на квадрокоптере вращаются в разных направлениях, важно то, что при их вращении все 4 гайки удерживающие винты сами затягиваются.
Как проверить, что вы поставили мотор с нужной резьбой? Просто держитесь за гайку на валу, и начните вращать мотор в том направлении, в котором он должен вращаться на коптере. Если гайка затягивается, тогда вы правильно выбрали направление резьбы 🙂
Лично я предпочитаю использовать одинаковую резьбу на всех моторах, так что никогда не запутаюсь с гайками. Когда придется искать дополнительные гайки в магазинах, вы поймете, как сложно найти гайки с левой резьбой.
Балансировка моторов
Первое что нужно сделать при получении новых моторов — это отбалансировать их. На самом деле это очень правильный шаг несмотря на то, что он не всегда необходим. Лично я балансирую крупные моторы типа 2212.
Практика показала, что моторы многих брендов балансировать не нужно, их качество и так отличное. Однако, если вы выбрали дешевые моторы, то не удивляйтесь более низкому качеству и необходимости балансировки.
Рекомендации по выбору
На выбор доступно огромное число моторов, это реально проблема. В моем списке комплектующих для миникоптеров я указал наиболее популярные модели.
А вот топ 5 лучших моторов для миникоптеров по версии нашего сообщества.
История изменений
- Октябрь 2016 — первая версия статьи
- Ноябрь 2016 — добавлена новая информация
- Май 2017 — добавлены характеристики моторов
- Январь 2018 — исправлены грамматические ошибки
- Март 2018 — добавлены разделы про обмотки, полюса, подшипники и крутящий момент
- Октябрь 2018 — добавлены информация о схемах крепления и PoPo-технологии
Спасибо. Хорошая статья для новичков. Жаль ее три года назад не было. Когда собирал свой коптер, был абсолютно не в теме и, по по сути «тыкал пальцем в небо» или смотрел аналоги… Почти угадал — оно летает :).
Статья — бла-бла-бла. Автор упорно шарахается от цифр и не приводит никакую конкретику.
Какие цифры вам нужны?
Тяга? Потребляемый ток? Ищите в обзорах конкретных моторов.
Конкретика? Посоветовать какой-то мотор? Все зависит от целей и размера коптера. Список рекомендованных для гоночных есть. есть статья про комплектующие для тинивупов и синевупов.
О, искал давно такие разъяснения, все понятно, спасибо! Основы основ, а остальное все а калькуляторах делается.