Пару раз меня спрашивали про разницу между RC rate и Pitch/Roll/Yaw rates, вот мои три копейки про то, что это такое и как оно влияет на ваш квадрокоптер с прошивкой Cleanflight, ну и как это настраивать.
Возможно еще вам будет интересно почитать про настройку ПИД.
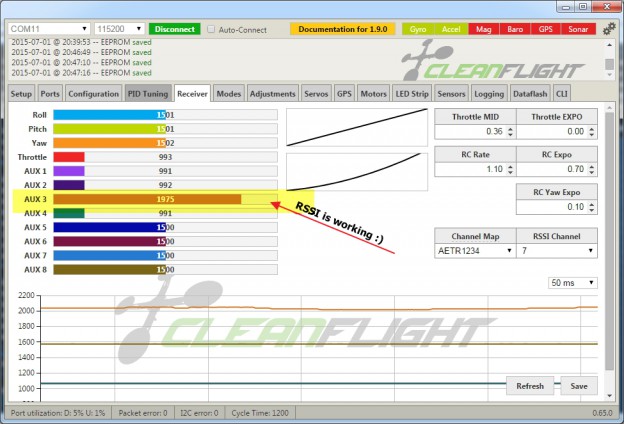
Что такое RC Rate?
RC Rate — это множитель значений с вашей аппаратуры управления для 3х осей: крен, тангаж и рысканье (одно значение для всех трех осей). Если вы увеличите это значение, то коптер будет реагировать более резко и агрессивно в ответ на движения стиков. По сути это чувствительность стиков.
Что такое Pitch/Roll/Yaw Rate?
Pitch/Roll/Yaw Rate меняют скорость с которой квадрик движется в сторону заданного угла или заданной скорости. Например, если вы увеличите ROLL RATE, то квадрик будет быстрее вращаться вокруг этой оси даже при небольшом отклонении стиков.
Они влияют на весь диапазон работы стиков, не только на конечные положения!
Pitch/Roll/Yaw Rate были тесно связаны с ПИД контроллерами раньше (и все еще важны для ПИД контроллеров PIDC 0, 3, 4 and 5). Они были введены в Multiwii для улучшения отклика в крайних точках для акробатических полетов.
Идея в том, что у вас будет относительно небольшая чувствительность когда стики недалеко от среднего положения, для «нормальных полетов», и супер быстрые флипы и ролы для акробатики. Позднее Pitch/Roll были разделены в Cleanflight, чтобы можно было настраивать оси по отдельности (изначально был 1 параметр для Roll и Pitch).
Как я упоминал, в ПИД контроллерах 0, 3, 4 и 5 эти значения влияют на расчет ПИД, так что увеличивая Pitch/Roll rate вы получаете более быстрые флипы и ролы, но коптер получается менее управляемым при крайних положениях стиков.
В новых ПИД контроллерах (1 и 2) в Cleanflight, pitch/roll rate больше не связаны с P и D коэффициентами, так что во время выполнения акробатических трюков управление более точное (лучше стабильность). В этом случае параметры работают как RC rate, т.е. определяют общую чувствительность стиков, разница в том, что можно настраивать оси по отдельности.
Что касается Yaw Rate (рысканье): читаем документацию по CleanFlight: «в ПИД контроллерах 0 и 5 используется для изменения значений ПИД, как было описано ранее. В ПИД контроллерах 1-4 работает как множитель чувствительности стика (как RC rate)»
Что на счет экспонент?
Значение экспоненты меняется между 0% и 100%. Оно уменьшает чувствительность стика около центрального положения (представьте параболу или кривую в виде буквы U, где нижняя часть это как раз среднее положение). 0% — значит без экспоненты, т.е. уменьшать чувствительность около центра не нужно и получается V образная кривая.
Экспоненту часто используют вместе с бОльшими значениями rate, таким образом пилот может точно управлять полетом если стики около центра, но и остается возможность выполнять резкие акробатические трюки в крайних положениях стиков.
Не существует правильного или неправильного значения экспоненты, все зависит от вас. У меня пальцы немного дрожат, поэтому у меня экспонента немного больше чем у других людей 🙂
Как поменять RC rate и Roll/Pitch/Yaw Rate?
Как правило я летаю в акро режиме с прошивкой Cleanflight. Я предпочитаю вначале настроить значение RC rate и RC expo (экспоненту) для нормальных полетов (без флипов и ролов). Затем я меняю Roll, Pitch and Yaw rates для того чтобы делать флипы и ролы до тех пор пока скорость вращения меня не устроит. Конечно, одновременно нужно подстроить и значения экспонент, чтобы убедиться что управление около центров не слишком дерганное.
Т.к. Pitch/Roll/Yaw rate увеличивают чувствительность стиков около центра, я иногда возвращаюсь назад и подстраиваю RC rate и expo еще раз.
Еще одна вещь которую я заметил при использовании разных прошивок, все они имеют разные диапазоны ПИД коэффициентов. Так что я никогда не пытался перенести значения ПИД с одной прошивки в другую. Не важно значения были так больше или меньше.
Также избегайте настройки экспоненты на передатчике, потому что это уменьшает разрешение значений стиков. Меняйте экспоненты ТОЛЬКО в полетном контроллере.
Для визуальных полетов (а не по FPV) я бы рекомендовал использовать бОльшие значения Roll/Pitch rate и меньшие значение RC rate, это сделает движения более четкими и точными. (но для FPV это будут слишком дерганые движения, похожие на движения роботов).
Апдейт (14.09.2015): Дэнни Круз (Danny Cruz) из нашей Multicopter International Group рассказал про разговор между ним и BorisB. Борис обратил внимание что в ПИД контроллерах 1 и 2 вы можете забыть про RC rate и поставить значение 1, затем настроить roll/pitch rate по отдельности (причины описаны выше). Я подумал, что должен упомянуть это еще раз, чтобы пилотам стало проще настраивать их коптеры.
Среднее значение газа и экспонента
В самом конце вы должны настроить среднее значение для газа и его экспоненту.
Среднее значение (Throttle Mid) для газа — по умолчанию — среднее положение стика, но, по моему мнению, оно должно быть равно значению при котором коптер висит. Если вам приходиться ставить газ больше 50% чтобы коптер висел, увеличьте Throttle Mid. Если у вашего коптера соотношение тяги к массе больше 2 (взлетает при газе меньше 50%), то вам наверное стоит уменьшить Throttle Mid, чтобы было легче контролировать высоту полета. Также нужно немного увеличить экспоненту, иначе изменение значения Throttle Mid не имеет смысла. Если экспонента = 0, то игнорируйте Throttle Mid.
Забавная ситуация, у некоторых бывают слишком мощные коптеры их среднее значение газа сильно больше чем газ висения, такие пилоты не могут приземлиться без падения. 🙂
Экспонента газа — это на сколько плоским будет график кривой газа около центра, так что чем более пологий график тем более плавное управление. Лично я предпочитаю либо вообще не использовать экспоненту либо использовать небольшое значение (<10), это дает лучшее разрешение значений газа. Особенно важно при полетах вблизи препятствий и в гонке.