В этой статье мы вкратце пройдемся по различным прошивкам для миникоптеров. Посмотрим на историю их создания и цели, которые они преследуют.
Прошивки для миникоптеров

В этой статье мы вкратце пройдемся по различным прошивкам для миникоптеров. Посмотрим на историю их создания и цели, которые они преследуют.

В этот раз мы собираем микро квадрик используя полетный контроллер Nano-B от MultiFlite и раму из поликарбоната от «Team JollyRC». Мне очень понравились модули собираемые в стек и полетный контроллер который поддерживает RGB светодиоды и пищалку.
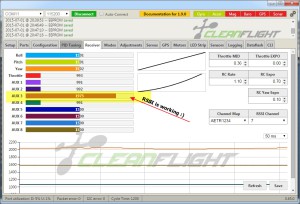
Пару раз меня спрашивали про разницу между RC rate и Pitch/Roll/Yaw rates, вот мои три копейки про то, что это такое и как оно влияет на ваш квадрокоптер с прошивкой Cleanflight, ну и как это настраивать.
Возможно еще вам будет интересно почитать про настройку ПИД.
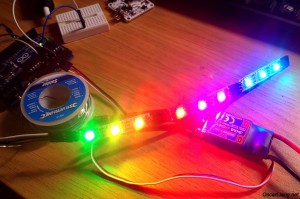
Cleanflight поддерживает управление светодиодными лентами, и это очень круто. В этой статье я покажу вам как я подключал и настраивал светодиоды в Naze32 с прошивкой Cleanflight. Примерно то же самое будет и в случае CC3D.
RGB светодиоды не только помогают вам найти коптер или определить его положение в пространстве, они также могут отображать полетные данные, используя разные цвета, например: низкий заряд аккумулятора, полетный режим, RSSI, уровень газа и т.д.

В этом посте я расскажу как я использую Blackbox для настройки ПИД коэффициентов. Несколько основных и простых шагов.
Настройки ПИД – это важная часть любых мультикоптеров и полетов по FPV. Раньше настройка ПИД была игрой в угадывание методом проб и ошибок. Вы настраивали значения ПИД путем выявления любых колебаний как при визуальном полете, так и через FPV.
На мой взгляд добавление Blackbox (черный ящик) в cleanflight сделало процесс настройки ПИДов более научным. Теперь вы можете видеть что является причиной вибраций, и какие значения ПИД регулятора должны быть изменены.